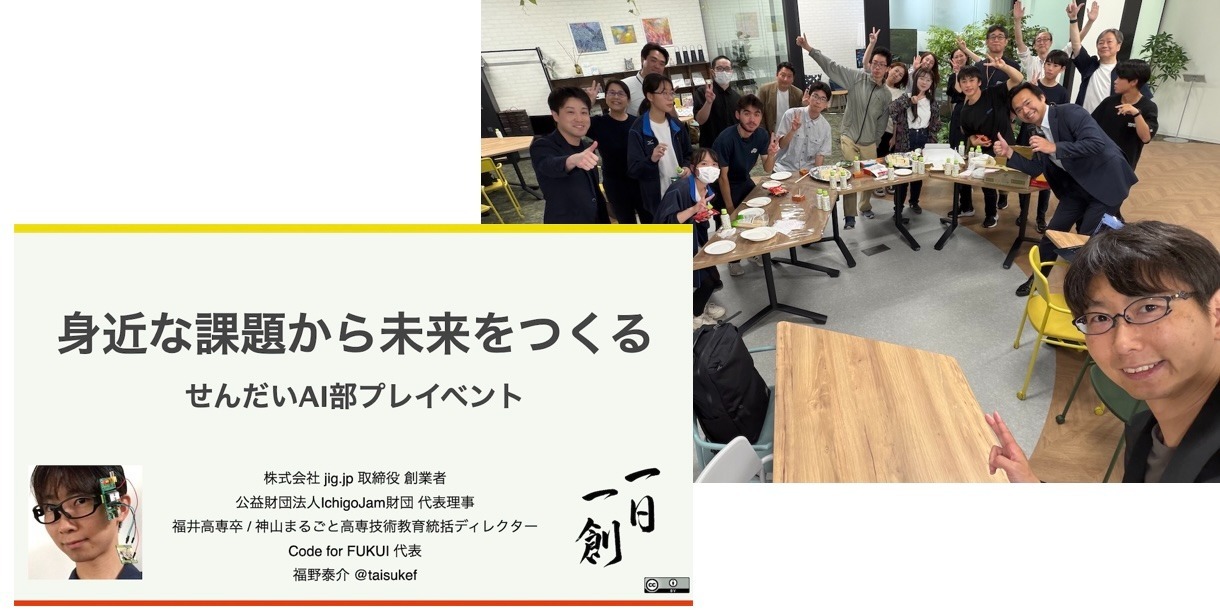

仙台市主催のイノベーションに向けた若者向け施策「せんだいAI部」
「身近な課題から未来をつくる」をテーマにハイブリッド講演。

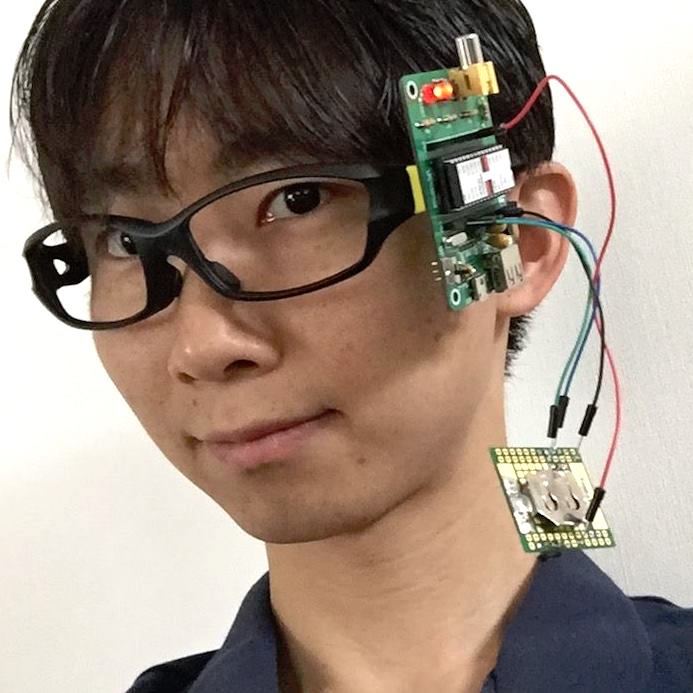
オフライン参加特典、ARメガネ、SABERA体験する仙台高専生!
新しいアイデアのコツは、新技術とかけ合わせること!
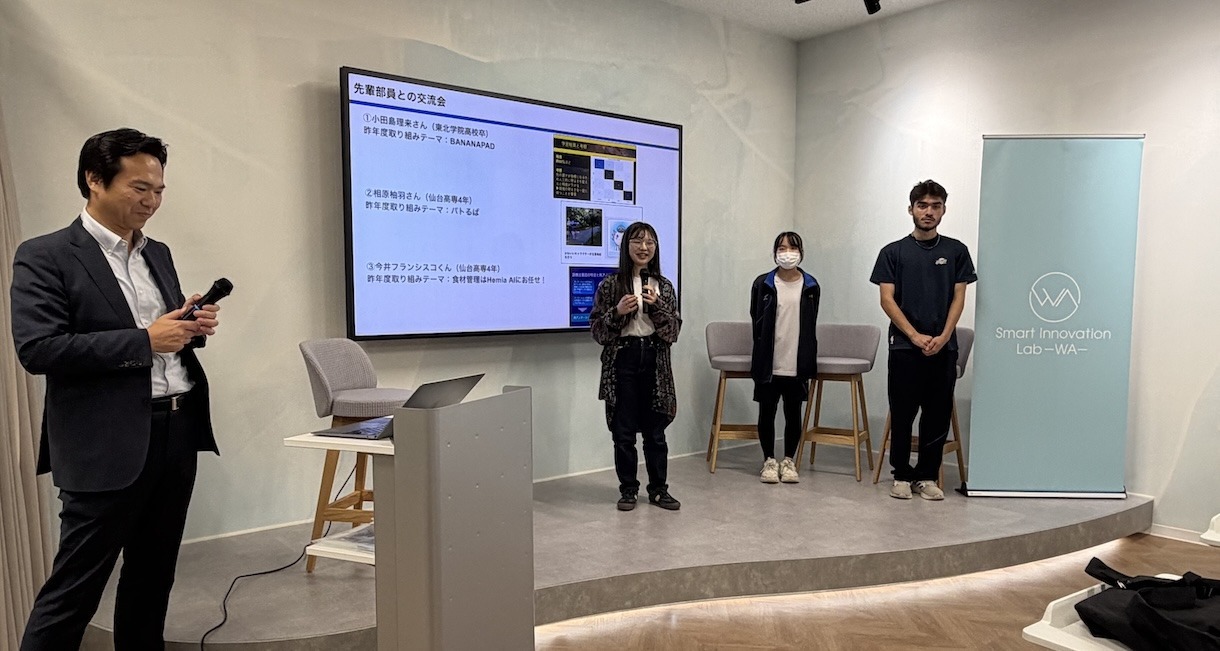
昨年度のせんだいAI部卒業生からメッセージ!

せんだいAI部のエグゼクティブアドバイザーに就任!
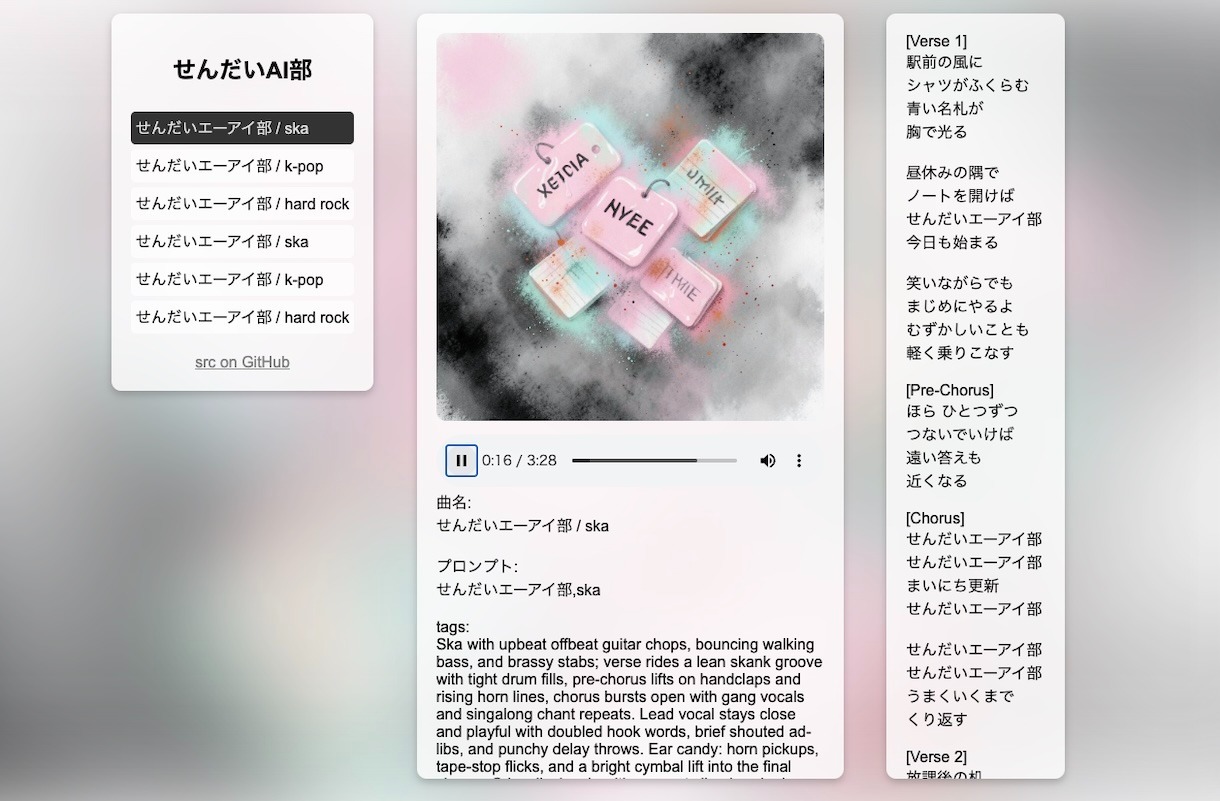
「アルバム せんだいAI部」
「せんだいエーアイ部」と曲調「スカ、K-POP、ハードロック」を組み合わせて生成しただけのAI作曲をAI学習拒否ライセンスにして公開。
ループ再生、イヤホン視聴、車での再生に対応するプレイヤーアプリにしたもの。こちらもオープンソース!
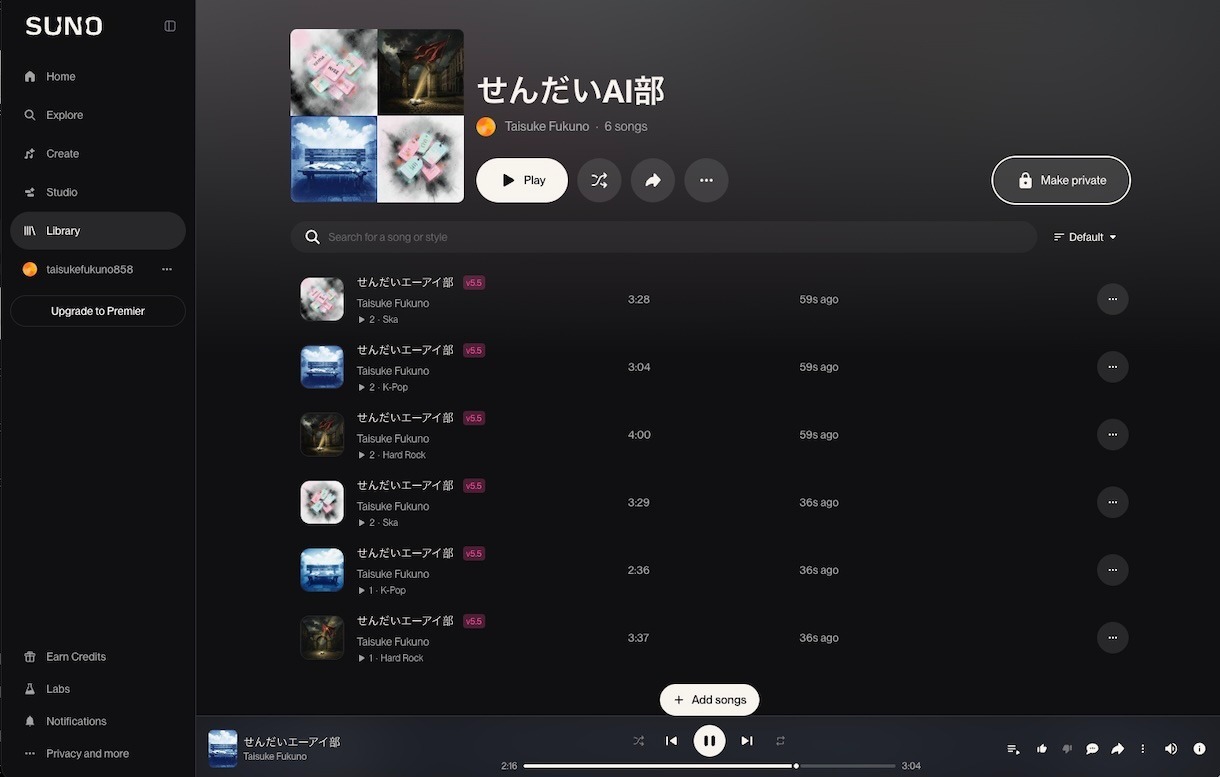
「せんだいAI部 - playlist - SUNO」
作成したプレイリストはこちら。リミックスなどにどうぞ!

仙台発の新作基板、白色LEDで表現した、おまつりの提灯がかっこいい!
ひとまず、なんでもつくっちゃおう!
links
- せんだいAI部
- 【イベント案内】せんだいAI部 2026 プレイベント&説明会 「身近な課題から未来をつくる」(主催:仙台市) | 仙台こども財団
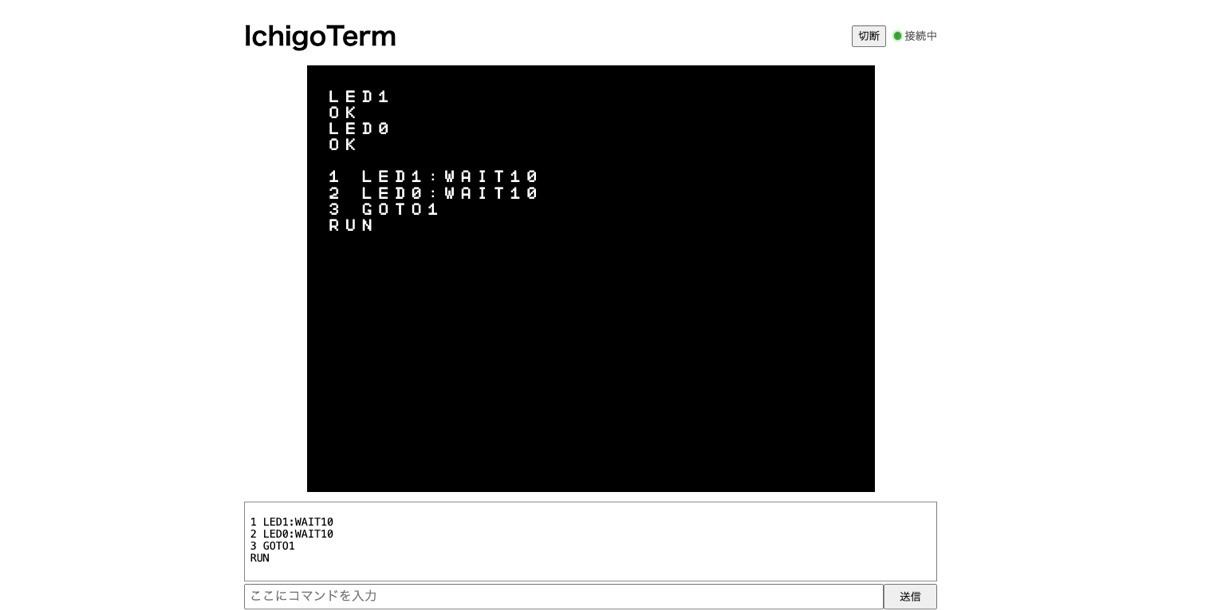 GIGA IchigoDakeや、シリアル通信で接続したIchigoJamで使うウェブアプリ「
GIGA IchigoDakeや、シリアル通信で接続したIchigoJamで使うウェブアプリ「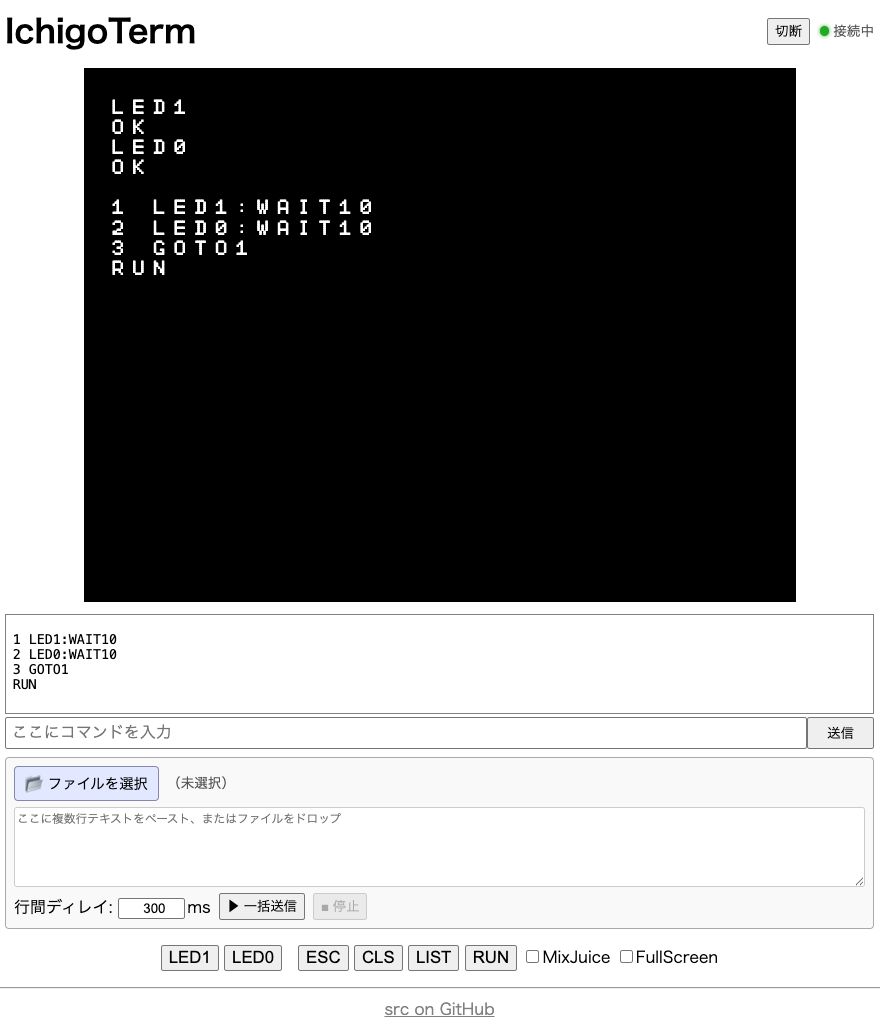
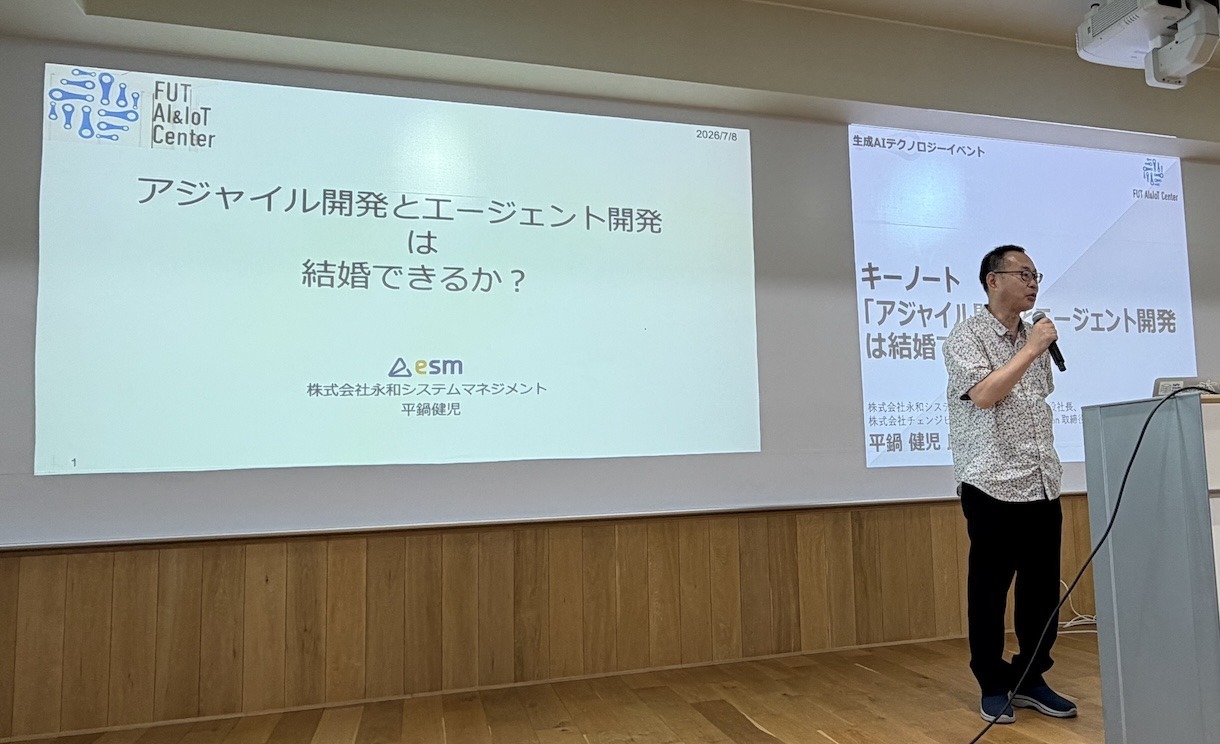
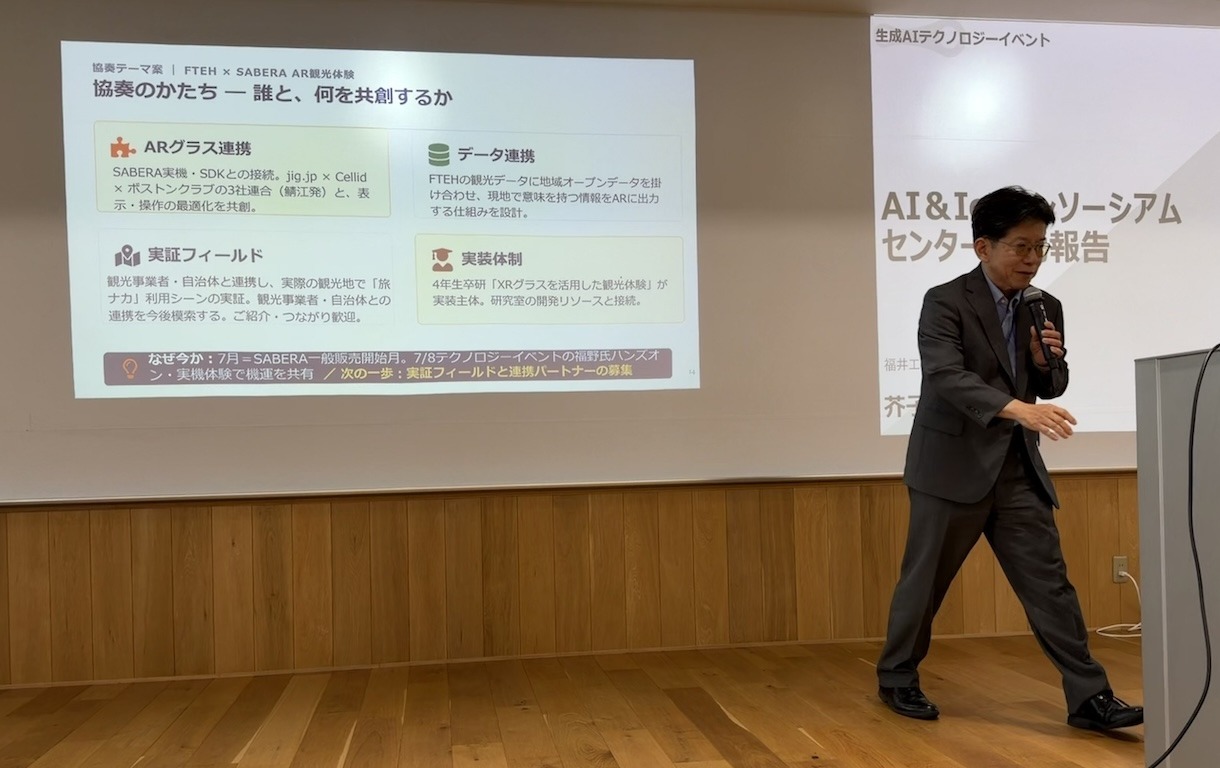
 福井工大でのイベント「
福井工大でのイベント「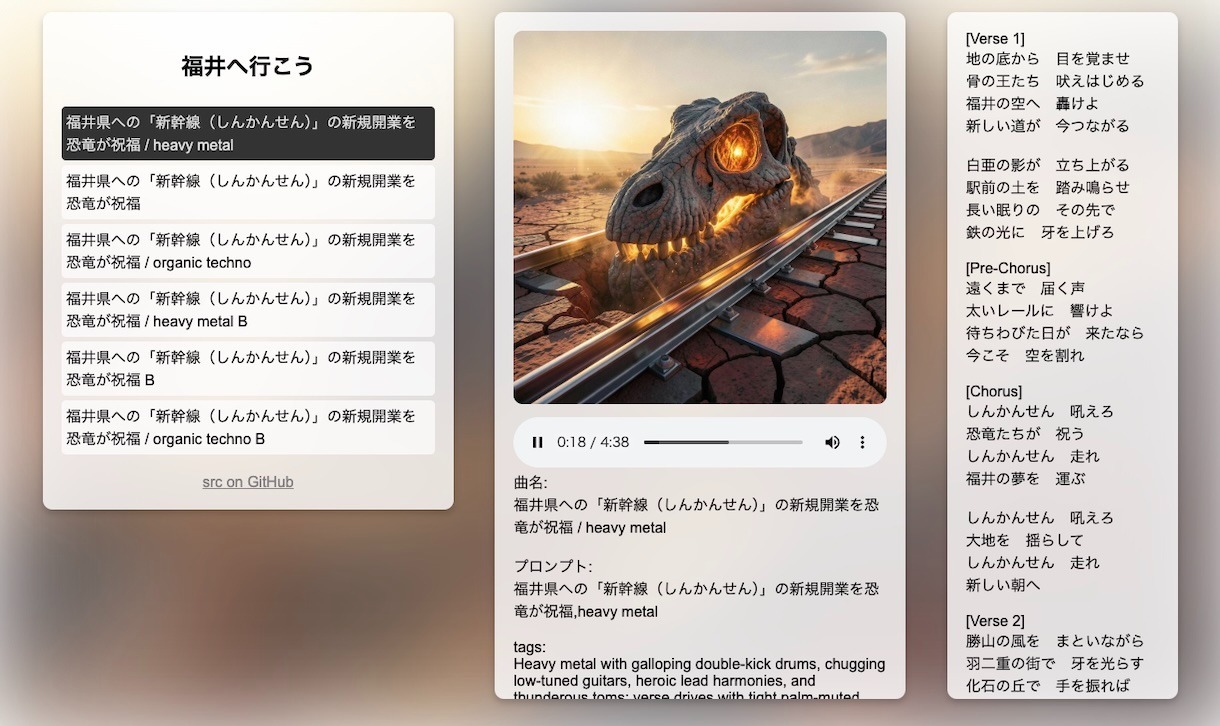




{kind=link}
{kind=link}
{kind=link}