2026-04-08 ITブートキャンプ Day2、体感プロトコルとサイバーセキュリティとAR個展プロトタイプ
2026-02-20 サイフラの発表用にソレノイドベルタイマーをつくる
2026-02-18 DECOチョコをキーホルダーにする3Dプリンター自作ケース
2026-02-17 レゴテクニックのリモコン制御モーターをIchigoJamで動かす
2026-02-16 格安モータードライバとIchigoJamを使ったモーター制御
2026-02-15 格安ギヤードモーターでレゴを動かす治具を3Dプリンターでつくる
2026-02-08 ご当地ロボコン用新型ロボット「カニタマ」で出場、京都向日市激辛ロボコン2026
2026-02-02 タミヤのローリングロボとレゴテクニック連結治具
2025-08-11 機構のオープンソース、レゴテクニックシリーズの魅力を伝える動画
2025-08-10 BPM110-120の音楽に合わせて心肺蘇生、CPRディスコとLED連動デバイス
2025-08-07 LANケーブルで延長しよう、DMX512ムービングライトで光の三原色実験
2025-08-04 LEDバー群が設置されたハコのシミュレーション
2025-07-19 オリジナルメッセージで光る推しうちわの作り方、明和電機、初の福井ライブ in 三国
2025-06-28 音楽生成APIを使ってより自由に創ろう、AI作曲
2025-04-03 木のキーホルダー彫刻ヘルパー for LaserPecker LP2
2025-03-11 卓上レーザー彫刻機、LaserPecker LP2用まっすぐ治具を3Dプリンターで作る
2025-03-10 3Dプリンターで作る、ぴったり写真立て
2025-02-23 創り手と直接話せて楽しいNT加賀2025、UIAPduinoで三三七拍子
2024-11-27 3DプリンターとLEDガラスカップでつくる、光るトナカイ
2024-11-20 0か1しかでないサイコロ、バイナリーダイスの3Dプリンター用STLデータ生成アプリ
2024-11-04 レゴで体験する月の満ち欠け、42179を組み立て&電動化!
2024-10-03 キラキラボード、ユニバーサル基板にはんだづけ
2024-09-19 さばえ3大フェスの晴れの願って作成、光るてるてるだるまづくり
2024-06-08 小学生によるワークショップ出展、いちごフレンズ始動! 六角形対応「ビーズなかま」
2024-04-28 さくらいとサンドーム公演、ペンライトをIchigoJamで操ろう
2024-04-20 見つけた!ものづくりへのはじめのいっぽ、ピカピカ基板の回路図作成 by KiCAD
2024-03-19 NXP社の新マイコン、MCXシリーズの開発ボードFRDM-MCXA153でエルチカ成功
2024-02-11 遊びの幅が広がるPS5 Accessコントローラーでスチールパン演奏アプリ
2023-11-19 感動のロボコン!越前がにロボコンのオープン部門出場、カニーヌちゃんのつくりかた
2023-08-02 光るトイレサインを作ろう with IchigoJam x フルカラーテープLED
2023-07-13 TechSeekerで初ワークショップ IchigoJam for Spresense
2023-05-13 IchigoJam as エッジAIプロジェクト、Spresenseはじめのいっぽ
2023-04-16 SWITCH級の計算能力がある組み込み開発環境Jetson Nanoはじめのいっぽ
2023-02-18 録音再生モジュール第二弾、楽しいはんだづけと、高専インカレチャレンジ with 全日空!
2023-02-16 録音再生キットを組み立て、IchigoJamで制御し、IoT化!
2022-12-17 越前がにロボコンに初出場!大人もチャレンジ、オープン部門 in 第6回越前がにロボコン
2022-11-12 秋月電子で買える小型LiDARをWeb Serial API経由で簡易3Dスキャン
2022-07-20 Angularで作られたオープンソースのドット絵ツールをパレット対応に
2022-07-18 8年前の3Dプリンター「ダヴィンチ1.0」修理
2022-05-21 鯖江のさばぷら、アイロンビーズワークショップとIchigoJamフォント
2022-05-19 秋葉原で採れるイチゴ、初級も上級者も楽しめる「えるちかいちご」 by PCN秋葉原
2022-05-10 WS2811 x IchigoJam x ダンボールで創るフルカラー照明
2021-11-17 作って解決、身近な課題。IchigoJamで得点システム「テニスポインター」
2021-11-07 小中学生のみなさまへ、越前がにロボコンにかける想いと舞台裏。越前がに解禁と豪華副賞!
2021-06-12 入出力切替とDACに対応するIchigoJam Rβ8
2020-12-25 MERRY XMAS with Color! IchigoJamのこれから
2020-11-24 テレビを30分でDX、イヤホンジャックと赤外線LEDを使ってアンプを連動起動する方法
2020-11-06 高専的な自由を感じた小学校、かつやま子どもの村小中学校とイルミプログラミング入門
2020-10-27 行け!のジェスチャーと共に出撃するドローンをプログラミングしよう IchigoJam編
2020-09-10 加賀市のステキ公共施設、KAGAものづくりラボとオープンデータ加賀マップ
2020-08-23 夜道安全イヌテック、ゲーミングチョーカー、7色点滅LEDを使ったライト版
2020-07-25 夜道の散歩を安全に!イヌテック、光る首輪、Lightning Choker のつくりかた
2020-07-20 microPythonで作るAIの目 for IchigoJam
2020-07-12 北海道直送、工夫と愛が詰まった新JAMCARのβ版の組み立て&プログラミング!
2020-07-04 最速の軸は赤軸か青軸か、3Dプリンターと電子工作とお手軽レンダ測定プログラム
2020-05-11 WebGPIOでIchigoJamエルチカ on Node.js
2020-03-01 IchigoJam RAM拡張法 - SRAM256kbit x I/Oエキスパンダ編
2019-12-29 回すパソコン、Hand Spinner Jam で Ichigo と表示させる!
2019-12-28 振るパソコン、StickJamで8x8フルカラー2コマアニメーション!
2019-12-10 点を線として見る、スマートホームはじめのいっぽ、IoTグラフ温度計とカーテンの効果
2019-12-02 IchigoJamの高度な使い方、UART編とLC/INPUTバグ修正
2019-11-08 お手軽サーボSG90を抵抗2つで無限回転するように改造する方法
2019-10-15 高専プロコン2019 自由部門課題部門、こうするともっとおもしろい!? 一言感想&写真集
2019-10-07 ネコとIoT、IchigoJamでつくる水飲み場IoTと圧力センサー
2019-09-25 LPC810writer - ブレッドボード vs ユニバーサル基板 vs プリント基板
2019-09-18 VRで見る「NT鯖江」会場の嚮陽会館 大会議室
2019-09-17 化学の実験とプログラミング、濁度センサーで反応速度をグラフ化してみよう
2019-09-12 IchigoJamとPCをつなごう、USBシリアルのつかいかた
2019-08-10 水回路で学ぶ電子回路 - 庭の水やりをIoT化しよう、配線編!
2019-07-26 紫外線量は赤外線量から推測できる!? 20円赤外線センサーで測る太陽光
2019-07-16 いちごのヘタ型コントローラー「HataPad」の組み立てとリアルタイム入力アップデート
2019-07-07 100Vは凄かった! はんだづけいらずの光センサー使用法と強烈不審者アラーム
2019-06-29 10円のNPNトランジスタひとつ! IchigoJamの音を爆音で鳴らす
2019-06-10 なにかつくろう「NT鯖江」ものづくり博2019にて初開催決定&VRで行きたくなる鯖江
2019-05-11 映えスポットのつくりかた - LPC800シリーズLPC810で制御するWS2812B
2019-05-08 IchigoJam Things はんだづけ組み立て失敗例と液晶用端子後付法
2019-05-04 Maker Faire Kyoto 2019 イチオシ3点の紹介動画、フォトレポート
2019-04-21 電気がなくても大丈夫!手回し発電で動かすIchigoJam!
2019-04-09 「光るネクタイ」を「ムーンライトネクタイ」に改造する方法、ちょっと嗜むArmマシン語
2019-03-24 化粧用スポンジで優しさUX - やわらかポインティングデバイスの家庭版瓦そばの試作
2019-03-10 IchigoJam を USB Type-C 電源で使う方法
2019-03-06 地域ぐるみの学び合いで創る「持続可能な地域ICTクラブ」とブレッドクラスト
2019-01-27 軽量版、光るXのつくりかた - 光るネクタイ&光るカチューシャ例
2018-12-16 IchigoJamをパソコンから自在に操るUSBシリアル作成
2018-12-14 BASICプログラム1行で色相環!20分で作るアキバエモメガネでアガるパーティー
2018-12-09 円形WS2812B x IchigoDake x DakeCap = エモペンダント
2018-12-02 企業の枠を超えたプログラミングと電子工作を広める「KidsVenture」 in 大阪
2018-10-26 さばえ博・SDGs・ネクタイ - さばえものづくり博覧会2018
2018-10-25 光るネクタイ IoTie 小型化 ver1.1
2018-10-24 IoTネクタイの作り方
2018-10-10 エレベーターでおなじみ7セグLED、WS2812B x IchigoJamで実現!
2018-10-06 黒電話をIchigoJamで鳴らす方法
2018-09-15 FPGAはじめのいっぽ、MAX10 FPGA 評価キットでエルチカ成功!
2018-09-13 開会式前に福井国体スタート!IoTシャトルバス稼働現場と稼働実績オープンデータ
2018-09-06 札幌からの贈りもの「SapporoJam」ピンソケットはんだづけ一人称動画
2018-08-16 1ピクセル カラーコピー機を作る - IoTセンサー入門 with IchigoJam
2018-08-10 湿度が要!IchigoJam x SHT31で計算する不快指数
2018-07-19 IchigoJamの宇宙進出! 宇宙と気圧とデジタルリコーダーづくり
2018-05-21 難解アナログ回路へ挑戦、音量測定サウンドモニターボードづくり for IchigoJam
2018-05-20 IoTネコライフ、ネコゴハンマシン改修とIchigoJam組み込みテクニック
2018-05-13 削るほどに滑らかに、木工開発環境づくり(物理)と道具の沼
2018-05-05 木工で快適な創造プラットフォームづくり、こどもの日
2018-05-01 モバイルバッテリーでも切れないIchigoJamのつくりかた
2018-04-29 鯖江凱旋!サバエレキシライブ記念、ほのかに光る稲穂づくり
2018-04-26 「世界一?簡単デジタルラジオキット」つくる、鯖江専用ラジオ
2018-04-19 電波時計の電波を見る。モールス信号デコーダーで学ぶデコーダープログラム
2018-03-06 勝手表彰「ダイヤ編成支援システム その筋屋」さん!バスリアルタイムオープンデータから本格ミニゲームまで、意外と使えるIchigoJam&sakura.io進呈! トランプゲーム実装例、神経衰弱
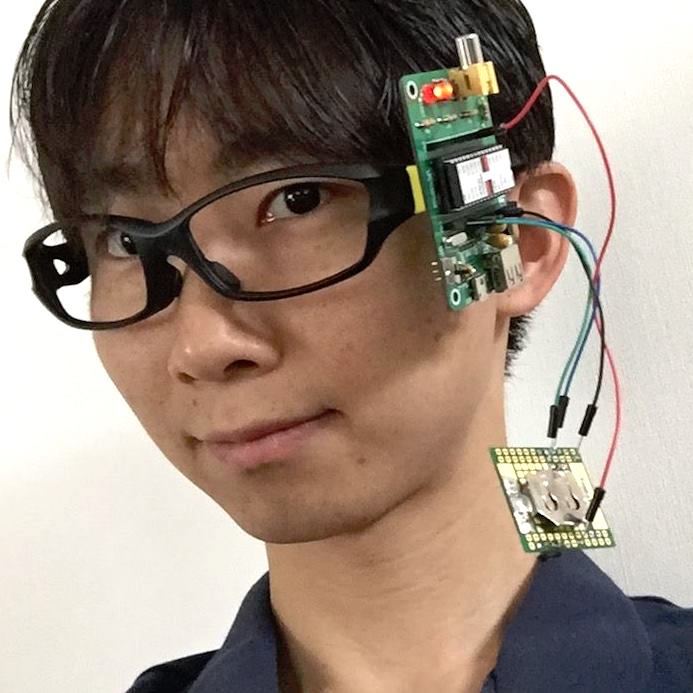
2018-02-20 LED2つで文字を読む、子供でも作れる2点式体表点字電脳メガネ
2018-02-14 IchigoJamカラフル電光掲示板のつくりかた
2018-01-17 IchigoJam x OLED、横向きサブディスプレイとして使う方法
2018-01-16 0.96インチOLEDをIchigoJamのサブディスプレイとして使おう
2018-01-13 何事も実質プログラミング! 高専カンファレンスえぶりわん in 大阪
2018-01-03 だいたい動いたSTM32F0版IchigoJam、画面&キーボード可能バージョンβ
2018-01-02 STM32F0版IchigoJam、シリアル通信バージョンβ
2017-12-15 IchigoJamでLPC810マイコン開発!(デプロイ・完結編)
2017-12-11 IchigoJam「で」LPC810マイコン開発!(まずは実行編)
2017-11-28 マシン語で作る!75円のかわいいArmマイコン、LPC810用エルチカプログラム
2017-11-23 材料費300円、自分で作るフルカラー5x5マトリクスLEDディスプレイ
2017-10-14 100円マイコンを使い倒そう!たった28byteから始めるマシン語アプリ開発
2017-10-11 IchigoJam RPi ベータ版公開!
2017-10-10 みちびき打上成功!GPSモジュールを使った狂わない時計のつくりかた
2017-09-23 ファミコンMIDI音源「ふぁみみみっでぃ」音声出力簡単改造 x IchigoJam
2017-09-22 セグメントを2つ減らして消費電力3割減、5セグメントLED時計風アプリ
2017-09-06 最大512chの照明コントロール!照明界の標準DMX512 x IchigoJam
2017-09-03 触るウェブ、Web MIDI API x TouchMIDI32 = WebTouch
2017-09-02 IchigoJam x YMF825でつくる、4オペレータFM音源音色エディタ
2017-09-01 BEEPで作るバンブラ奏法8bit楽器、IchigoJam1画面プログラムと蔵BAR訪問
2017-08-08 $15 Computer IchigoJam meets Cute Manufacture Pimoroni in UK, and connects SkyWriter HAT!
2017-08-05 ものづくりは国境を超える、Maker Faire Tokyo 2017 と光るペンダント
2017-08-01 静岡沼津高専で披露された謎FM音源!? 三島でパソコンとゲームとこどもメイカーづくり
2017-07-17 リレーとRTCとIchigoJamで改造、自動ネコゴハンマシン
2017-07-08 ものづくり好きによるNT金沢、つないで遊ぶ Pico-Color x IchigoJam
2017-07-06 いい温度センサー ADT7310 を IchigoJam で使う
2017-06-21 IchigoJamではじめるIoT sakura.io ハンズオン(データ発信編)
2017-06-10 こどもビルチカ&めがねルーレットの裏側 めがねフェス2017 - The back of the Big LED Blink & Sabaean Roulette at MeganeFes2017
2017-05-21 CoderBunnyz, 8-age girl CEO made a board game to learn programming / 8歳女子CEO開発のプログラミング学習ボードゲーム
2017-03-12 Micro Dot pHAT controlled by IchigoJam I2C
2017-02-07 IchigoJam meets GPS receiver 'u-blox NEO-7M'
2017-02-03 IchigoJam PC Connection Shield
2016-12-30 ウーハーの電源をアンプに連動して入れるデバイスをIchigoJamでつくる
2016-12-25 電池ケースと組み込みIchigoJamでつくるイチゴトーン、こどもプロコン2016の冬!
2016-11-17 さくらのIoT Platformβ、ブレイクアウトボードでハードウェア準備
2016-10-28 オムロン顔認識チップ x IchigoJam でつくる年齢当てマシン!
2016-10-02 「IchigoJam mobile β2」128x64サイズのST7567液晶対応版
2016-09-24 電圧自在!LM317計算機
2016-09-05 お花LEDボード for IchigoJam の発注・はんだづけ・プログラミング
2016-09-01 誰でも編集可能な「ものづくりマップ」 TechShop Tokyo見学
2016-08-06 FaBo発売! 創って話して2度おいしい Maker Faire Tokyo 2016
2016-07-31 LPC1114でロースピードモード限定のUSBホスト、USBキーボード解析編
2016-07-29 最小0.25mm!? スマホの中身を支える世界のMurata、手はんだする表面実装
2016-07-26 走っているバスの速度計をIchigoJamとサーボでつくる
2016-07-24 Hana道場ファミコンナイト! 初代ファミコンをAV端子でつなぐ改造PCB
2016-07-16 「球根はじめました」3Dプリンターでつくる球根の水耕栽培用上げ底
2016-07-08 IchigoJam新基板に表面実装CPUをはんだづけする方法
2016-06-26 アナログ感が楽しい「はんだづけ」 ボタン電池シールドで3時間動いたIchigoJam
2016-06-20 オープンデータな国土地理院地図でつくる選挙ポスター掲示場所マップ(印刷OK!)
2016-06-12 キーボード一体型「IchigoJam X」の作り方&落ちゲーCLMS
2016-06-08 じぶんでつくる感動パソコン、IchigoJamプログラミングはじめのいっぽ動画教材公開!
2016-06-04 100均水鉄砲&電子パーツでオリジナルおもちゃづくりのススメ
2016-05-22 Control the Robot with 2 Motors! The next step after build your IchigoJam in Vietnam Da Nang!
2016-05-15 一見分かりやすいビジュアル言語 vs 想像かき立てるテキスト言語
2016-04-30 3GIM x IchigoJam x 0SIM でつくるクラウド温度センサー
2016-04-17 空飛ぶコンピューター、格安ドローンIchigoJam搭載実験
2016-03-22 7セグLEDで電子工作「じゃんけんゲーム」その1
2016-02-16 クラウド型プリント基板エディタ Upverter でつくる IchigoJam用シールド
2016-02-13 BASICで「こどもIoT」 IchigoJam x 3GIM x 0SIM 実験
2016-01-25 IchigoJamで省エネIoT、動作周波数別消費電流とスリープモード
2016-01-13 鯖江市図書館、空席案内アプリ「sabota」IoT化実験
2016-01-10 カラス対策とレーザー工作とネコ遊び
2015-12-28 ジャンクパソコンで遊ぼう! 「30日でできる! OS自作入門」でパソコン再入門
2015-12-27 ラジオを作ろう!小型コンピューターIchigoJamで制御しよう!
2015-12-19 ものづくりデイ、高専カンファレンス100&Gugen2015
2015-12-17 スピード優先「jigカレー」 オープンソースなラピッドプロトタイピング料理
2015-12-15 IchigoJamの裏ワザでつくるデータロガー
2015-12-11 jig.jp恒例500円プレゼント交換つき忘年会!あるものも創る
2015-12-04 レーザーカッターで切ってはならないもの Hana道場で使い方講座
2015-11-29 旧Raspberry Pi用コネクタをユニバーサル基板でつくる
2015-11-21 食・人・ものづくり、個でつながる静岡と福井 - タミヤフェア2015
2015-11-20 レーザーカッターはプリンターでした - イノベーションの種を植えようHana道場
2015-11-11 下がり続ける夢実現ハードル - DMM.make AKIBA 1周年
2015-10-09 ぬいぐるみをパソコンで動かそう! ふくいITフォーラム x ラプトくん
2015-10-04 YES/NOテンプレート、4円で作るスマートな出欠回答ツール
2015-09-23 100V LEDをIchigoJamでエルチカ! はじめての回路図エディタ
2015-09-22 禁断の100V電子工作はじめ、ミサイルスイッチでLED電球を灯す!
2015-09-19 IchigoJam用単一電源をDIY
2015-09-15 組み込みIchigoJam用、低消費電力モード追加 1.1beta4
2015-09-06 チョコの箱・福井のトマト・WECKのビンでつくるステレオアンプ
2015-09-01 IchigoJam 1.1β+サーボモーターを使ったガジェットハッカソン
2015-08-10 aitendo版IchigoJam「ai.Jam」組み立てガイド
2015-07-29 オープンデータと子どもプログラミングの橋渡し - 霞ヶ関子どもデー 内閣官房IT室
2015-07-28 鯖江市小中学校指導者向けプログラミング体験会 子ども起業までの道筋を創る!
2015-07-26 マイコンLPC1114の外部クリスタルの自動判別方法
2015-07-25 世界一簡単なサーボモーター制御、ロボットに一歩近づくIchigoJam
2015-07-23 IchigoJam大喜利、センサー活用ガジェットづくりはジャムセッションのように!
2015-07-19 ものづくりは分解から! IchigoJam用の便利電源を求めて
2015-05-24 日曜大工が楽しい、青空が気持ち良い初夏の福井!
2015-05-12 500円で挑戦! IchigoJam はんだづけナイト開催レポート
2015-05-03 お陽さま見えたらUVレジンでマイLEDづくり
2015-05-02 音痴なIchigoJamの矯正する
2015-04-30 こどもに武器を! 活況さばえプログラミングクラブ、3Dプリンター入門
2015-04-29 鯖江のチタンのメガネとクラフトワークと電子工作 re:クラチタランプを改造!
2015-04-07 IchigoJamをI2Cで拡張する!IC40コ付きで4千円の技術書が楽しい!
2015-03-22 Pancakeを焼く休日 日曜電子工作のススメ
2015-03-01 ちりめんx電子工作 +ITで広がる「ものづくりのまち鯖江」
2015-02-16 祝!100都市!! テクノロジーx地方創生 WBSウェアラブル取材
2015-02-07 Aplix MyBeacon を使った sabota 図書館センサーづくり
2015-01-25 外部記憶装置とROMカセットに対応!こどもパソコンIchigoJam
2015-01-24 大阪から考えるシビックテックに鯖江から参加!
2015-01-23 日本のオープンデータ都市数表示板
2015-01-21 改造で遊ぶ学び IchigoJamをパソコンとつなぐ改造例
2015-01-19 期待の福井高専 眼鏡工学科! コンピューターの組み立てからフィッティングまで!
2015-01-15 世界広がるハンダスキル!3分エレクトロメイキング、レンダゲームのアーケードゲーム風
2015-01-11 15分でハンダ付け、ワンキーゲーム機IchigoDotプリント基板バージョンの作り方
2015-01-01 創造は力なり スロットおみくじハードウェアで占う2015年
2014-12-27 オリジナルプリント基板に初挑戦 - PS/2キーボード変換基板
2014-12-23 ワンキーゲーム機「IchigoDot」オープンソースハードウェアとして公開!
2014-12-21 マイコンLPC1114でオリジナルワンキーゲーム機づくり / ゲーム第一弾「レンダ」
2014-12-19 プレゼント交換が熱い!jig流の忘年会とクリスマス
2014-12-06 ビスケットボードでつくるIchigoJam、やさしい組み立て方
2014-09-23 マイコン制御の円状LEDペンダントのレシピ / お手軽オープンソースハードウェア
2014-09-11 Apple Watch モックを創って分かった10のこと
2014-09-01 おかしなヤツに会いに行く MA10福井予選ハッカソン審査テック編
2014-08-16 明和電機x大人の科学、自動手書きマシーン「オートマ・テ」の型を3Dプリンターでつくる
2014-07-19 憧れの5セグLEDを3DプリンタとIchigoJamで作ってみた
2014-07-13 3Dプリンターで楽しいプチ量産
2014-07-12 空席センサーオープンデータのつくりかた、JK課発、図書館アプリ「sabota」の舞台裏
2014-07-06 失敗から学ぶ、3Dプリンターで生け花の花瓶づくり
2014-07-05 7万円、3Dプリンターの衝撃、もうひとつのIoT
2014-05-31 IchigoJamで格安ロボコン!TAMIYA昆虫ロボをちょっと改造
2014-05-27 IchigoJam組み立てキットで自分だけのパソコンづくり(上級編)
2014-05-10 謎なものエンカウント率=豊かさの指標 Touchyで出会った明和電機メカ花見
2014-05-07 LPC1114+BASICで手軽な組み込み開発 IchigoJam バイナリ版
2014-05-05 モバイルの原点、ポケコンでプラレールモーター制御実験
2014-05-04 IchigoJamの汎用入出力でルーレットシールド
2014-04-29 創るは最高の遊び、レゴでつくるオリジナルラジコンカー
2014-04-28 JK課企画アプリ、図書館空席センサーとアプリデザイン
2014-04-06 スチールユニットにぴったりのデスクトップ間接照明をDIY
2014-04-01 目指すはMSX! Raspberry Pi より安価な IchigoJam 発表!
2014-03-30 電子ピアノをMIDIとマイコンでIoTに
2014-03-29 HOLDTUBEとLPC1114で広がるウェアラブル!着るマトリクスLED編
2014-03-22 ネコエサカウンターづくり LPC1114と7セグLED直結が便利
2014-03-16 治具で広がる可能性
2014-03-15 テレビに映る勝手制作BITMAN by LPC1114
2014-02-11 社長のサイン入り!明和電機のBITMANを自作してみる
2014-02-02 午年、酒坏立てをレゴで作る - 織田家発祥の剣神社
2014-02-01 Google Glassと鯖江メガネの勝手コラボ
2014-01-26 自分で創って自分で演奏するアーティスト、明和電機で湧き上がる創作意欲
2014-01-18 鯖江の本気メイカー、タイヨー電子の医療機器を分解してみました
2014-01-13 玄関先でPM2.5の値を教えてくれる音声合成を使ったIoTデモ
2014-01-12 ものづくり入門にオススメ、LEG Technic シリーズに組み立て新アプリ登場!
2014-01-11 84円マイコン、LPC810でおもちゃを音楽が鳴るように改造する トラ技入門本発売記念
2014-01-03 日本発のIoT!現実的なネット家電規格 ECHONET Lite
2014-01-02 LPC810でIoTのススメ、ミニマムハードウェア開発環境を整える
2013-12-21 ポータブルゲーム機を創るゲーム LPC1114boy
2013-12-15 FS-A1GT 今でも楽しめる20年前のコンピュータ MSX修理その2
2013-12-14 はんだづけで創るクリスマスグッズ
2013-11-30 MSX30周年記念にMSXturboRの修理に挑戦!
2013-11-24 回路図を描くと動いちゃう凄いチップ、PSoC(ピーソック)
2013-11-19 時間を創出するツール、80円マイコンLPC810で夜の快適な自転車探し
2013-11-09 マイコンでクラウドごっこ、LPC1114の仮想化に成功!
2013-11-04 LPC1114のDIPを28ピン➔20ピンにしてTinyBasicを動かしてみました
2013-11-03 110円マイコン(LPC1114)で子供用パソコンを創ってみる
2013-10-28 シンプル電脳メガネ1号、ウェアラブル3分タイマー
2013-10-26 100均と110円マイコンでつくるYoruLight
2013-10-20 ものづくり魂に火をつけろ!鯖江ものづくり博2013
2013-10-19 マイコンとPCの隙間を埋める Raspberry Pi
2013-10-18 WebAPIで動くレゴで創った鯖江つつじバス ITS世界会議記念
2013-10-06 バラす・つなぎ・創る 100円均一気軽に培うものづくり力
2013-09-28 自分で作るという贅沢、オリジナルLED照明
2013-09-21 アートの秋、電子アクセサリーづくり
2013-09-18 16.3gのニュースガジェット、モールスニュース
2013-09-16 Astralsterのラジコン化ミニ四駆、ハードなマッシュアップ
2013-09-15 NikonリモコンシャッターをLPC1114で自作する
2013-09-01 ハードウェアのマッシュアップ、光るロピュタロボット兵
2013-08-25 フィジコン入門 - LPC1114ミニマム開発キット(ハードウェア編)
2013-08-18 BLEでアプリ化する家電 / iPhoneでレゴ車を動かす
2013-08-11 レゴとマイコンで創る即席ねこのおもちゃ
2013-07-27 LPC1114で奏でるミンティア
2013-07-20 極小マイコンLPC812で光るミンティア
2013-07-15 FourBeatをiPhoneにつなぐ! FourBeat x konashi でドラム
2013-07-12 クラウドファンディング成功!リアルなスイッチ、FourBeat到着レビュー!
2013-07-04 鯖江の眼鏡は世界一!を目指した作成会議 電飾眼鏡を試作
2013-06-30 スマホ保留機(ケータイ通話にも保留音を!)
2013-06-29 スーファミコントローラーをMacにつなぐ(mbed)
2013-06-22 暮らしに電子の力を!使う道具ゼロの電子工作の紹介
2013-06-16 手軽で安価で1km飛ぶ!無線通信TWE-Liteで同期ライト試作
2013-06-15 自動的に画面をスクロールするデバイス「スマホオートスクローラー」試作
2013-06-10 夜道安全ちりめんスマホアクセサリー「ちりめん電子ホタル」
2013-06-09 フィジコン部設立 ミニマムコンピュータを創る
2013-06-01 見た目は大事、プラレールをリモコンで動かす機能実装編
2013-05-29 サイコロでラピッドプロトタイピング!jig.jpパズルの舞台裏
2013-05-27 jig.jp デジタルバッヂ
2013-05-26 ミニデジタルサイネージを創ってみる
2013-05-19 レゴでシンプルなサッカーロボ
2013-05-12 Androidピカピカアクセサリの試作、アナログ回路編
2013-05-11 外装とメカ、ハードウェアのプロトタイプはレゴでつくる
2013-05-05 削りの美学、ジョグマッピングツールのつくりかた (Android USB Host)
2013-05-04 王山古墳群をジョグマッピング
2013-04-29 ファミリー用コンピュータはテレビにつなごう
2013-04-21 110円で買えるコンピュータ
2013-04-14 one button - ハードウェアを仕上げてみる
2013-04-07 プラレールをiPhoneで操作、4/14ご縁市にて公開!
2013-03-31 フィジカル熊センサー テクノ手芸
2013-03-20 ネット家電とコミュニティラジオ PM2.5計つくってみました
2013-03-19 ネット時代の元気玉、クラウドファンディングで加速するものづくり
2013-03-17 原始的なマルチリモコン
2013-03-03 マイコンでマイリモコン作成
2013-02-28 konashiとマイコンをつなぐ
2013-02-19 抵抗カラー時計
2013-02-17 自作MARY用簡易UIシールド
2013-02-11 katamukeon - ハードとソフトで楽器作りが楽しい
2013-02-10 LEGOでクレーンゲーム風
2013-02-09 スーファミコントローラーをiPhoneにつなぐ
2013-02-03 Macで始める、おすすめのArmマイコン
2013-02-02 MacのJavaでNXTロボットをコントロール
2013-01-27 オタマトーンみたいなものを電子工作
2013-01-21 I2Cがステキ!konashiでモーターを動かす
2013-01-20 はじめての電子工作でレゴを動かす
2013-01-14 YOGEN DICE (予言ダイス) with konashi prototype



{kind=link}
{kind=link}
{kind=link}