(サーボをあやつる PWM(ピーダブリューエム) - IchigoJamプリント)
サーボモーターとは、角度を指定できるモーターで、ロボットの関節や、ラジコンの操縦、工場のオートメーションなど、さまざまなところで使われています。 安いものだと1つ400円で購入でき、気軽な工作にもぴったりです。(マイクロサーボ9g SG-90: サーボ 秋月電子通商 電子部品 ネット通販)
使い方は、新しく追加したIchigoJamのコマンド、PWM(ピーダブリューエム)を使います。PWMとはパルス・ウィズ・モジュレーション(Pulse Width Modulation)の略で、出力を指定時間電圧を高くする、パルスを使ってコントロールするテクニックです。
IchigoJamでは、OUT2〜5をPWM制御可能としていて、先頭にポート番号(2〜5)、次にパルス幅を0.01ミリ秒単位で指定(例、100指定で1ミリ秒)、三番目にパルスの繰り返す周期を0.01ミリ秒単位で指定(省略すると2000=20ミリ秒となります)。
周期はOUT2-4とOUT5と2種類指定できます(OUT2-4のいずれかで周期を指定すると指定していないOUT2-4の出力がすべて連動して変わります)。

百聞は一見に如かず。LEDをOUT2に長い方、GNDかOUT1に短い方を挿しこみ、このコードを動かしてみましょう。
ロウソクのようにLEDの明るさがランダムに変わります。

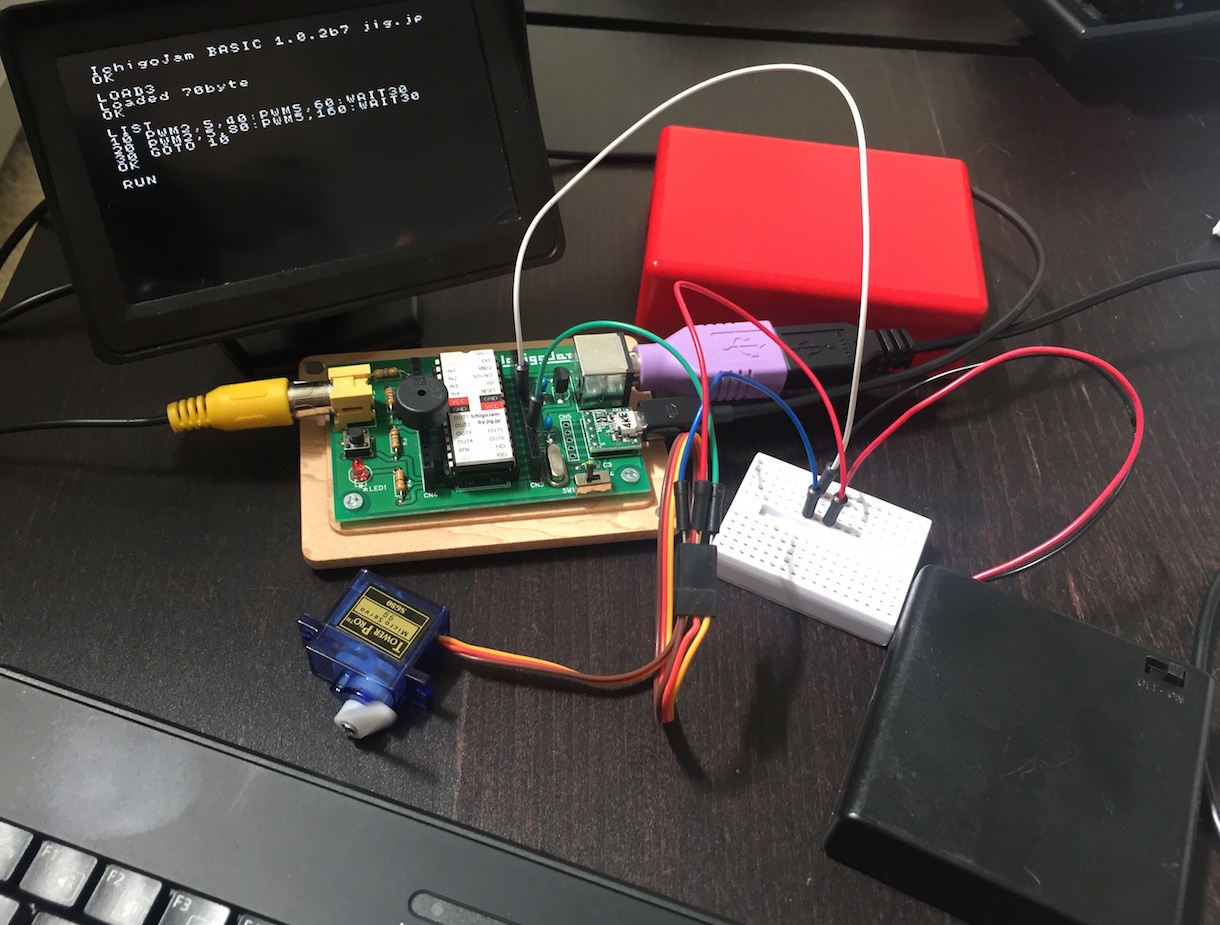
サーボモーターは別に5V程度の電源を用意してサーボの赤に接続、サーボの茶色を電源のマイナスとIchigoJamのGND両方につなぎ、コントロール用の線(オレンジ)をOUT5に接続して、上記コードを実行!
今度はOUT2とGNDに圧電サウンダーをつないで、音も合わせて出しています。
1.0.2のベータ版は、Facebookグループ「IchigoJam-FAN」にて公開中!



{kind=link}
{kind=link}
{kind=link}