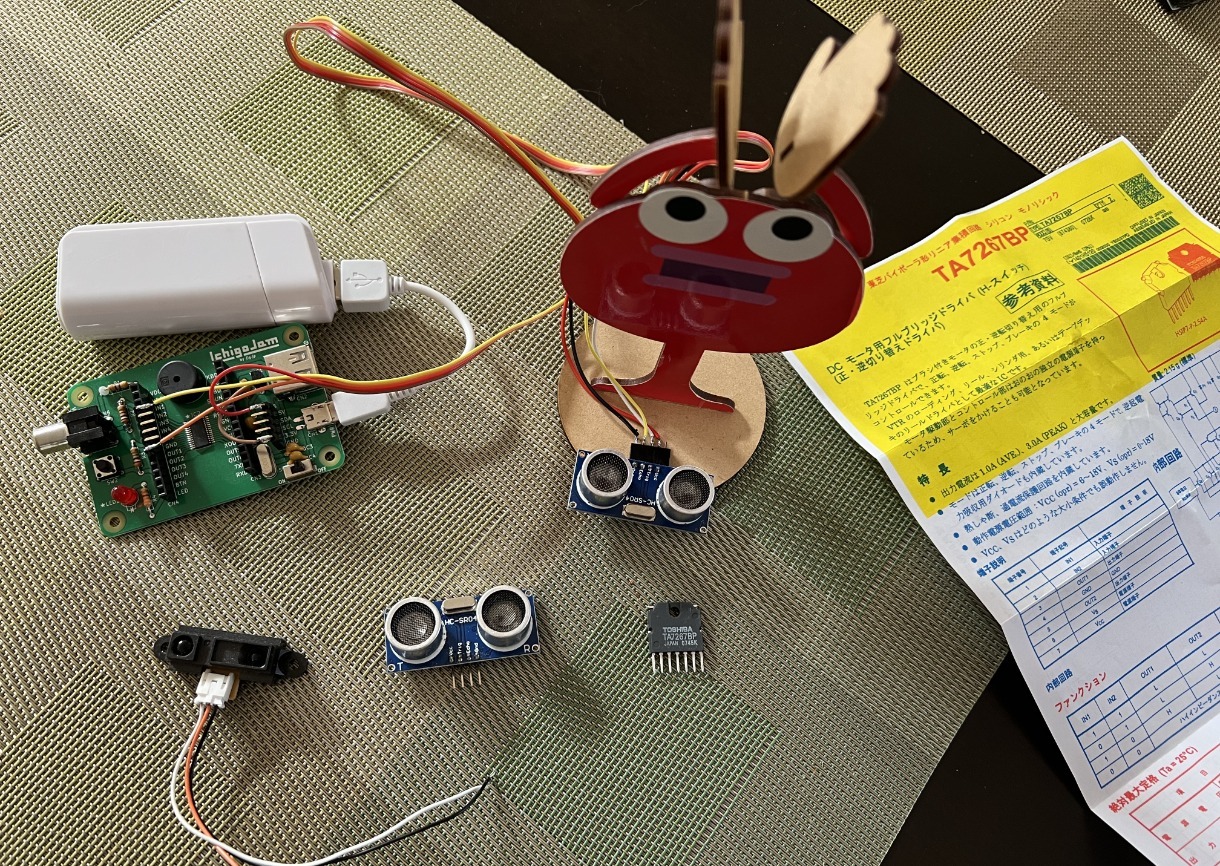
今回使わなくなった赤外線測距センサー、超音波測距センサー HC-SR04、モータードライバ TA7267BP
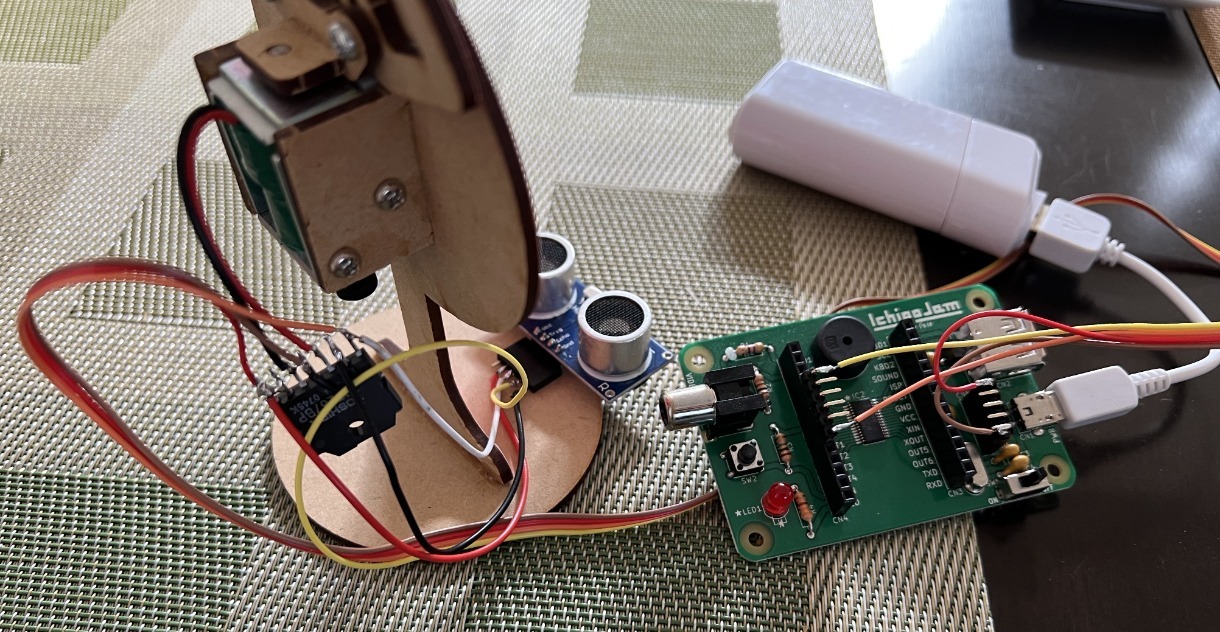
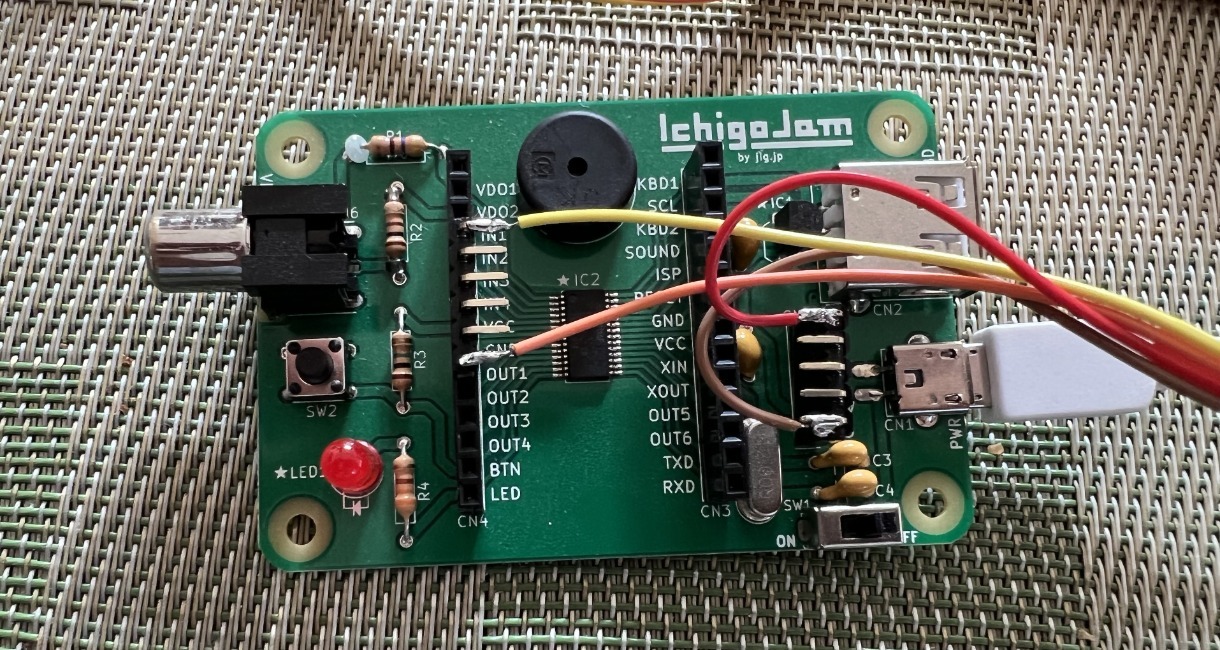
全体の配線はこんな感じ

モータードライバ TA7267BP の説明書を見て配線します。(秋月では取り扱いが終了していて、モータードライバー TB6643KQ が近そう)
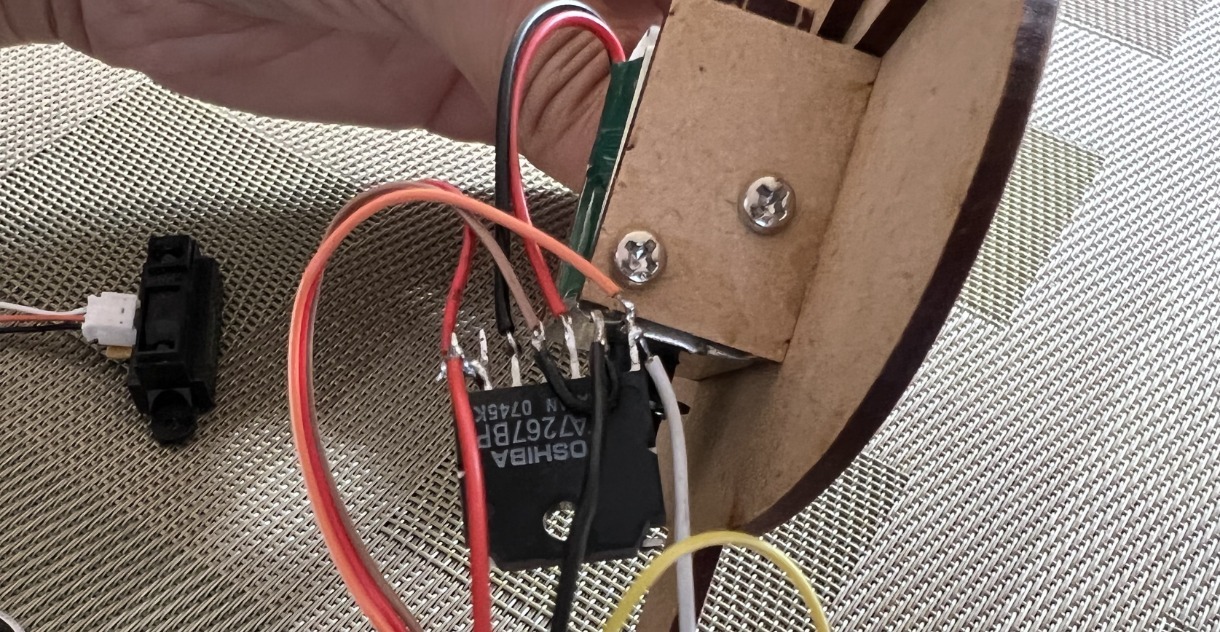
左から1番と2番を電源、3番と5番にソレノイドを接続、4番はグランド。IchigoJamのOUT1からの制御信号を7番へ。6番は0固定にするので4番のグランドと接続。
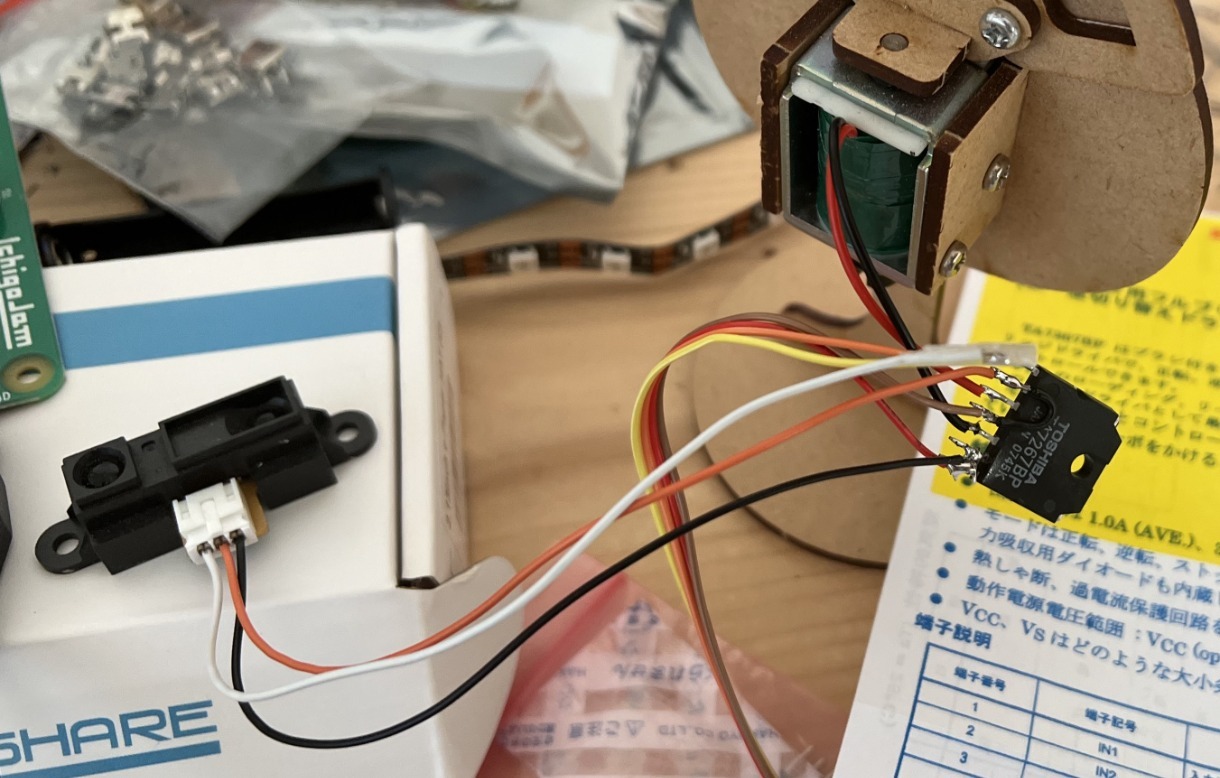
なぜかソレノイドがブルブル震えてしまうトラブルに遭遇。原因は赤外線測距センサーと判明。外すと正常に動きます。何か電源にノイズが乗っているか足りないかな気がしますが、電解コンデンサ10uFを足しても解決しなかったので、センサーを変更することに。
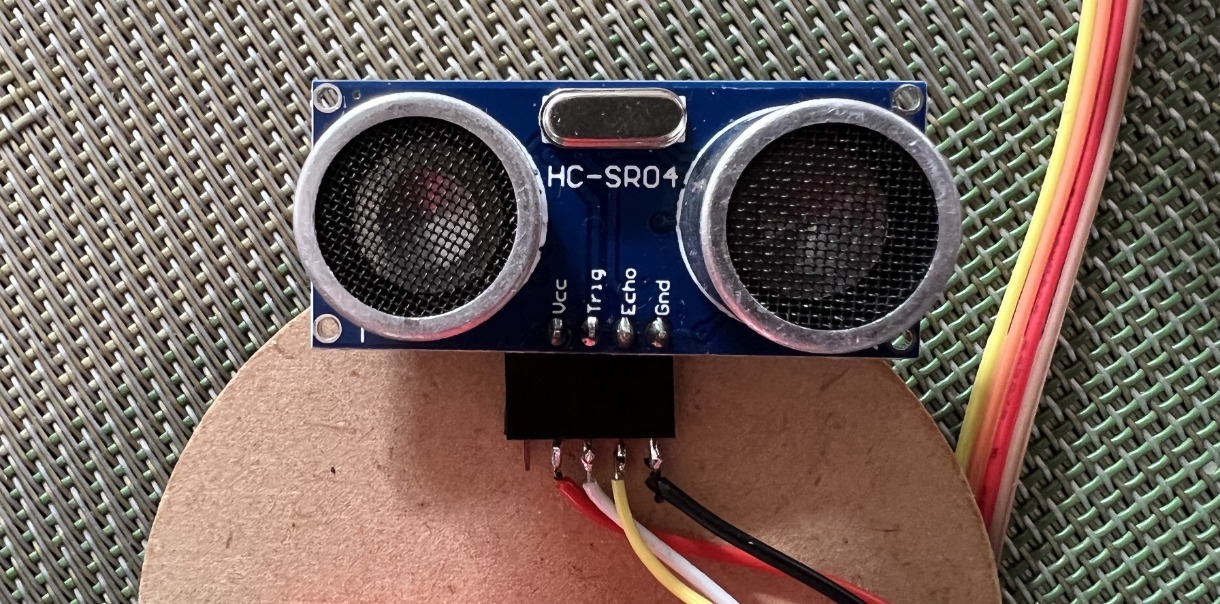
超音波センサー(HC-SR04)は電源を共有しても問題なし。超音波を発するTrigはIchigoJamとの配線を4本で作ってしまった関係で、ソレノイドと共有するOUT1へ、超音波の反射を受け取るEchoをIchigoJamのIN2へそれぞれ接続。
(参考、200円 超音波距離センサー HC-SR04 を IchigoJam で使う方法 - Armマシン語で時間を測ろう)
電源は5V、IN2、OUT1のみを使います。L字ピンヘッダーへのはんだづけするとコンパクト。

スッキリコンパクトに改造完了!

プログラムはこんな感じ。超音波センターは精度がいらないのでBASICバージョン。VIDEO0で画面表示を一旦止めるともうちょっと高さの調整がしやすくなります。
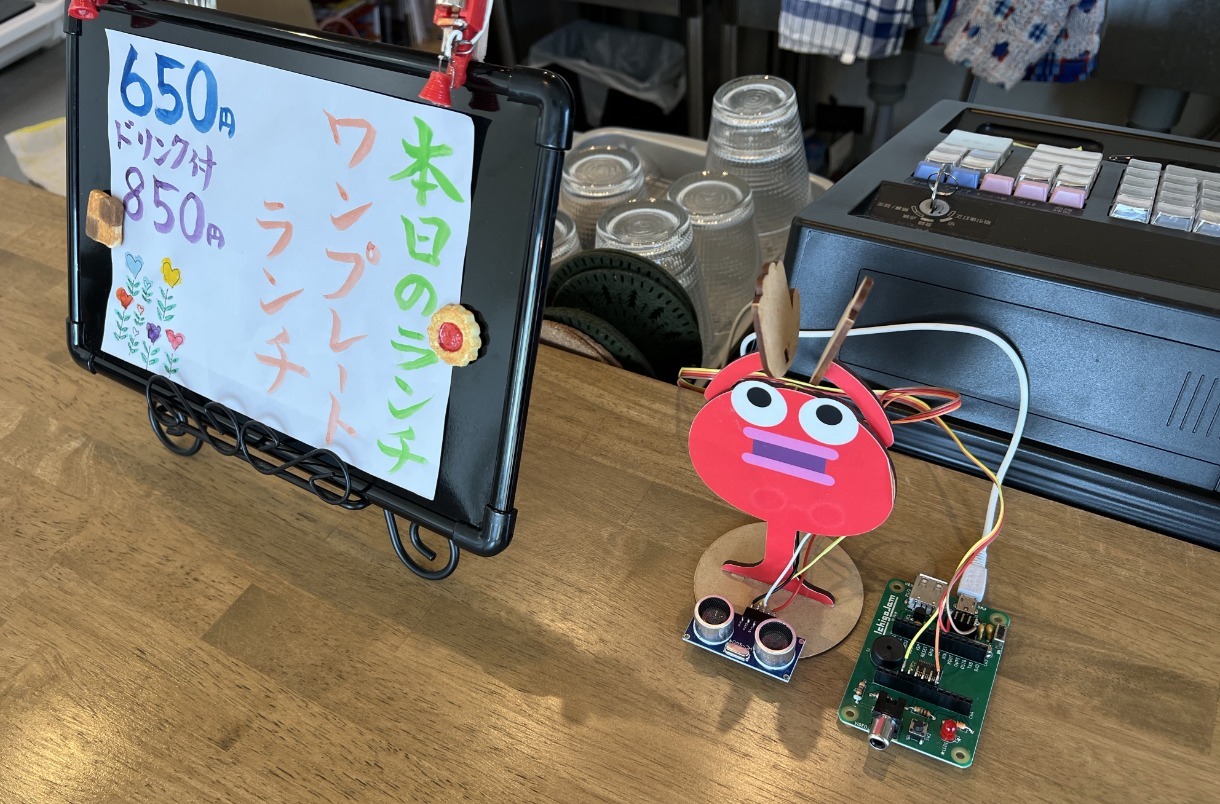
再び、EIGHT SENSE で活躍中!
#ビッグクラッピーナノ?で非接触呼び鈴 powered by #IchigoJamhttps://t.co/NEEKRPhp0l pic.twitter.com/WOcgH56I6g
— 福野泰介 (@taisukef) April 12, 2022



{kind=link}
{kind=link}
{kind=link}