2026-07-03
Qwen3:4bを使った、ブラウザローカルLLMができたので、それを応用したゲームづくり。ひとまず3択クイズができました。ハルシネーション(もっともらしい嘘)だらけのクイズゲームが楽しめます。
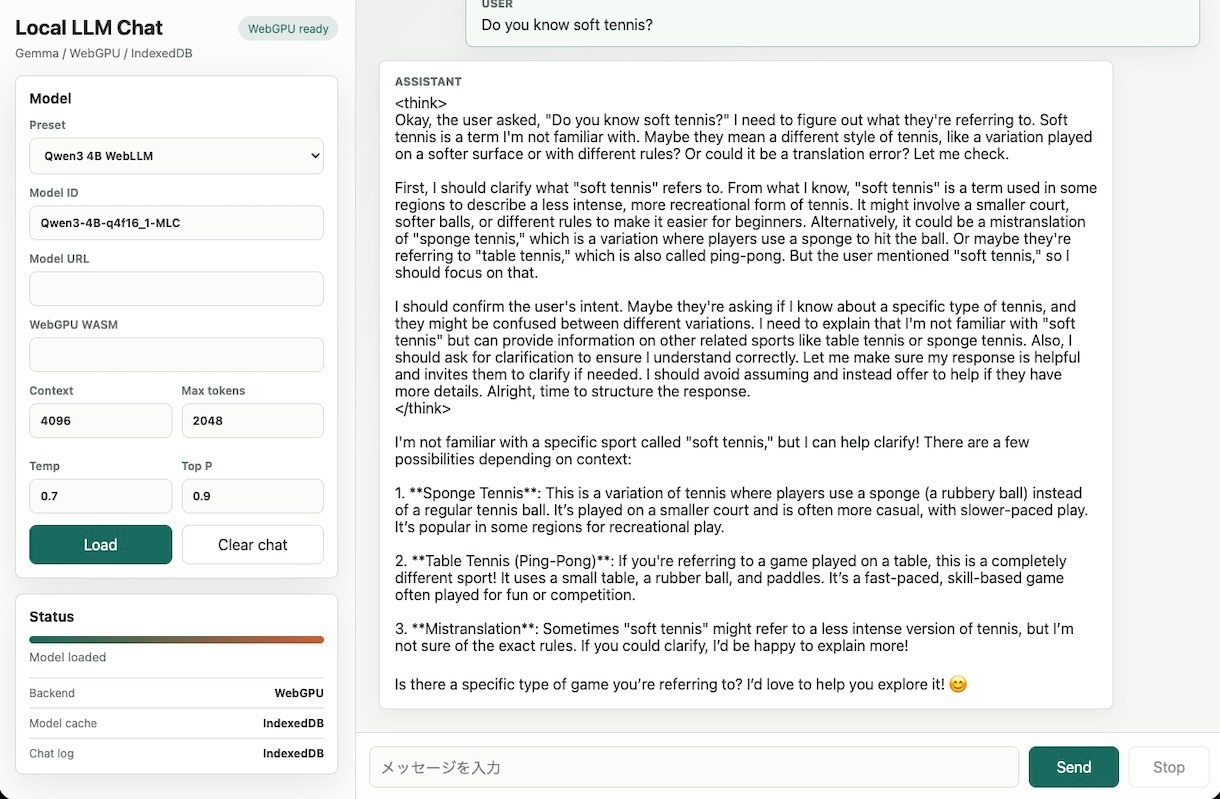
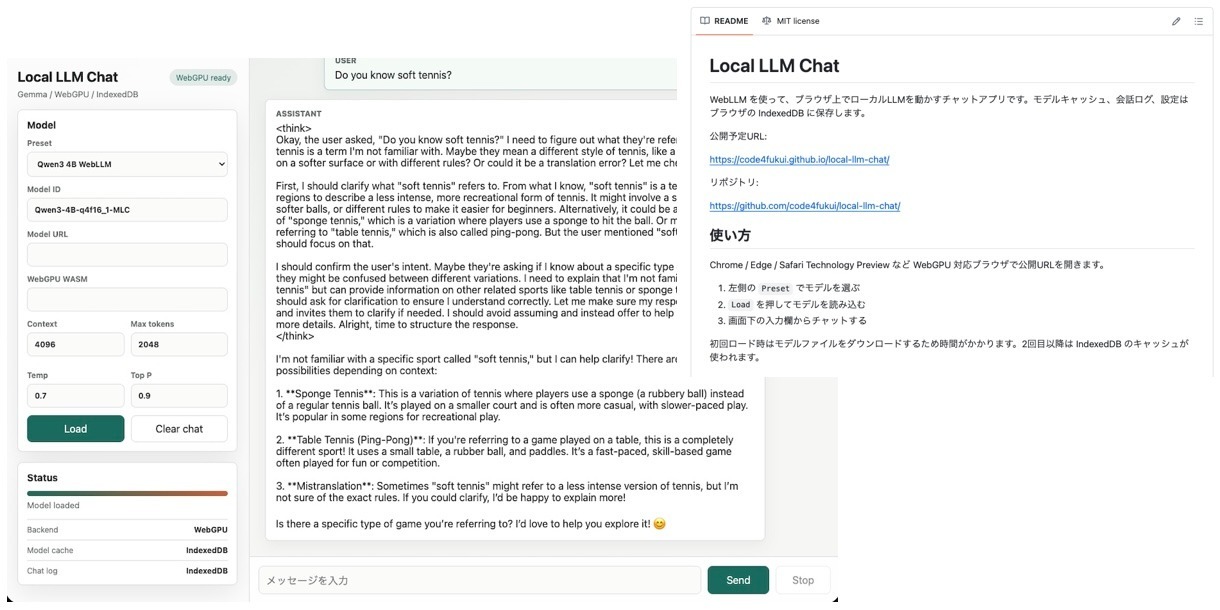
「Local LLM Chat」
まず「Load」でダウンロードし、ローカルのIndexedDBに保存されます。それを使ってローカルLLMの準備完了。話しかけると答えてくれます。
ただし、Qwen3なので think が多め。Gemma3:4bでも動かしてみたいところ。

「泊まったジャパン」
ブラウザ内の保存領域、localStorageに保存し、CSVエクスポート・インポートに対応。サーバーには送信されないので気軽にお使いいただけます。

 MacBookAirでも動くローカルLLM。「
MacBookAirでも動くローカルLLM。「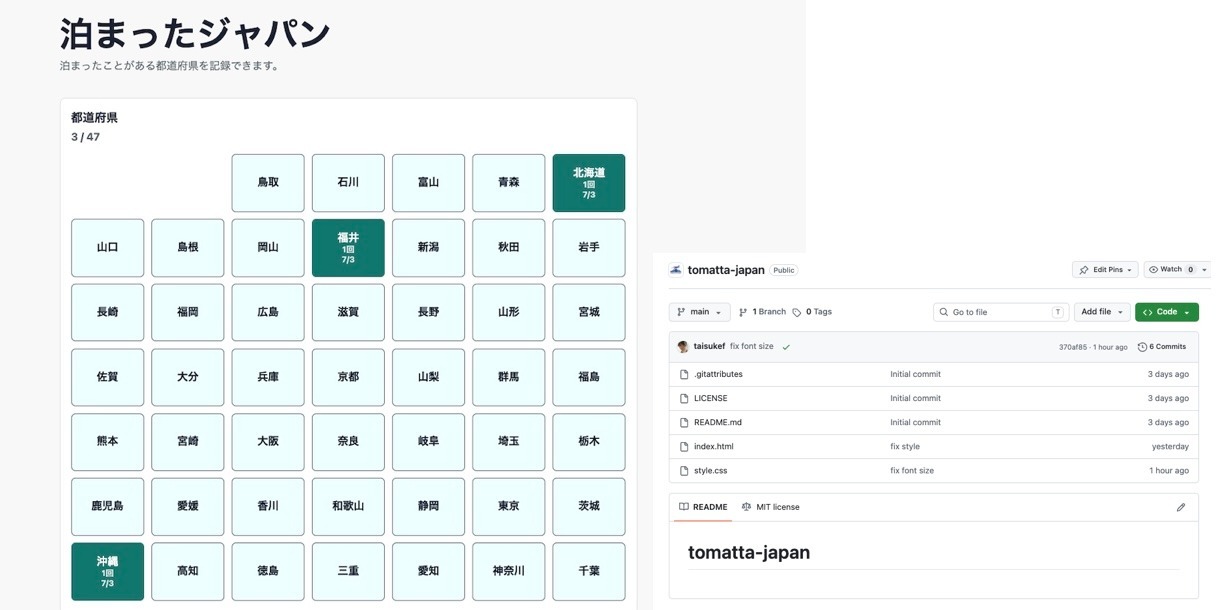 「
「


{kind=link}
{kind=link}
{kind=link}