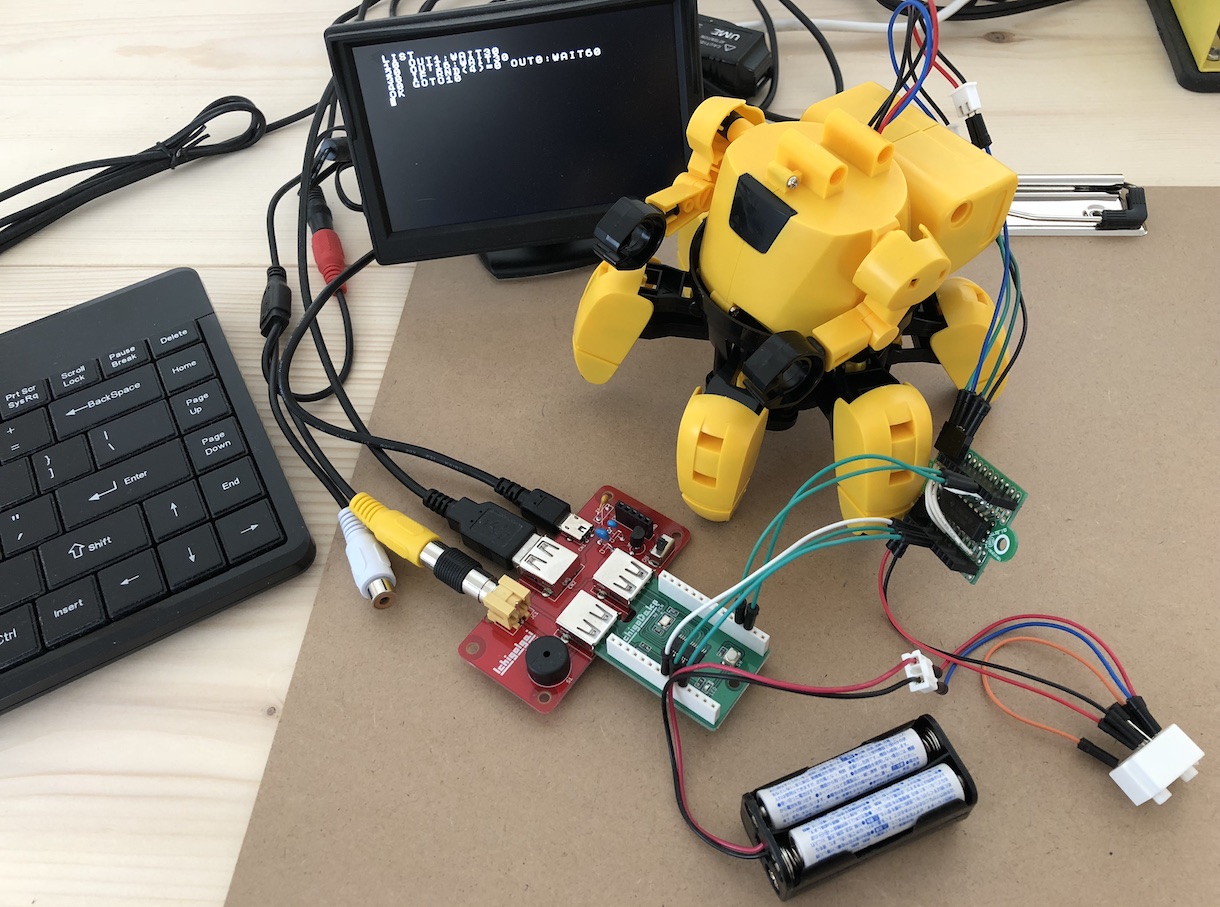
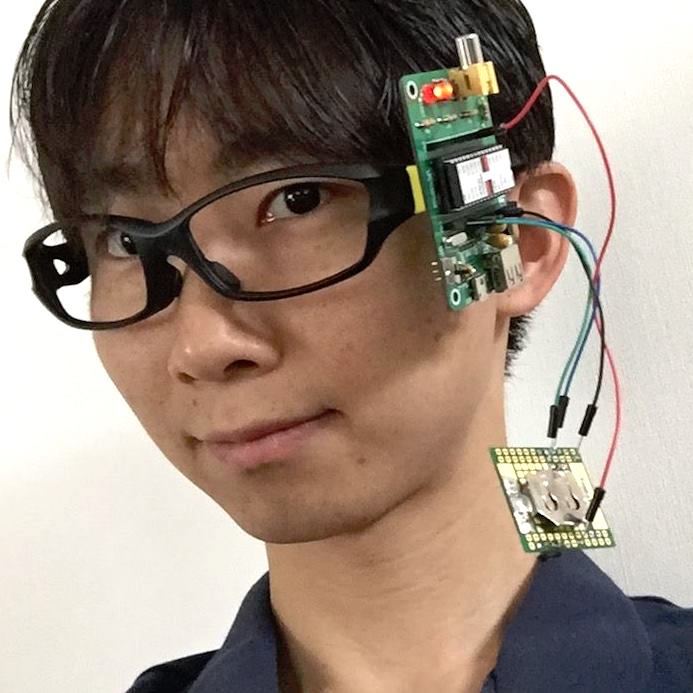
頭を一旦外して、IchigoJamとモータードライバ経由でつないで、動かしてみました。センサーつけたり、喋らせたり、ネットにつないだりしたいですね。

FOLO、Amazonで約4000円とお手頃価格
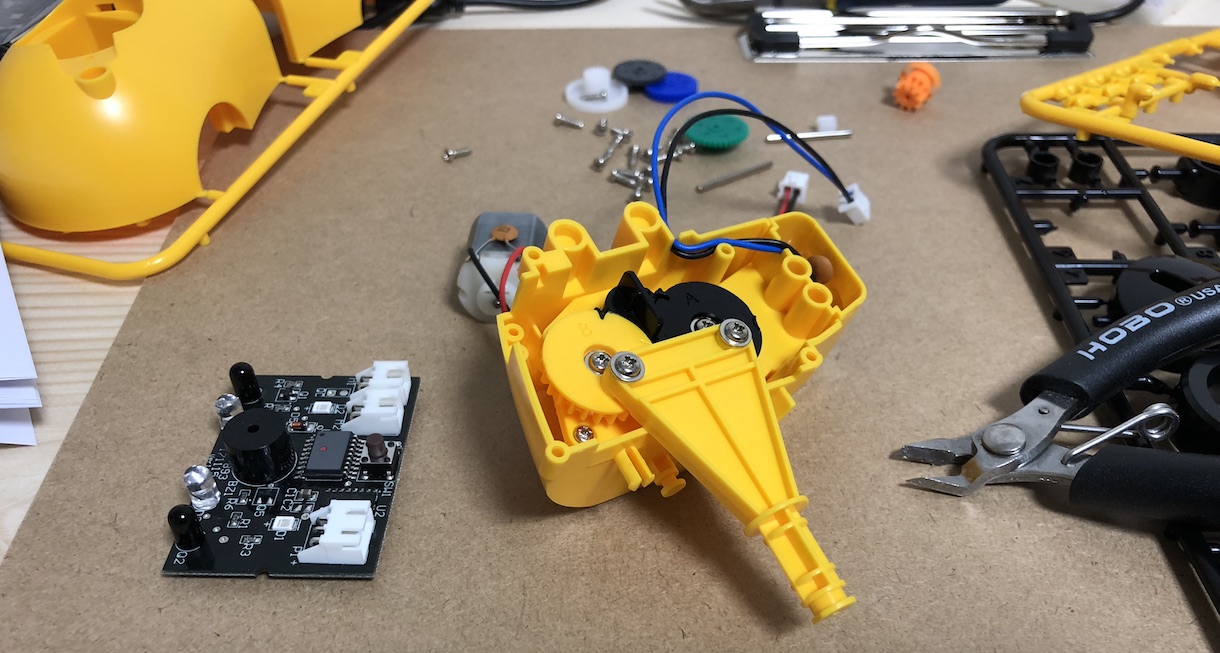
前後に歩く心臓部。歯車セット用の治具を使ってネジ止め。グリスを塗りながら作ると、静かでなめらかな動きになるはず!(塗らずに組み立てたので一度オーバーホールする予定)
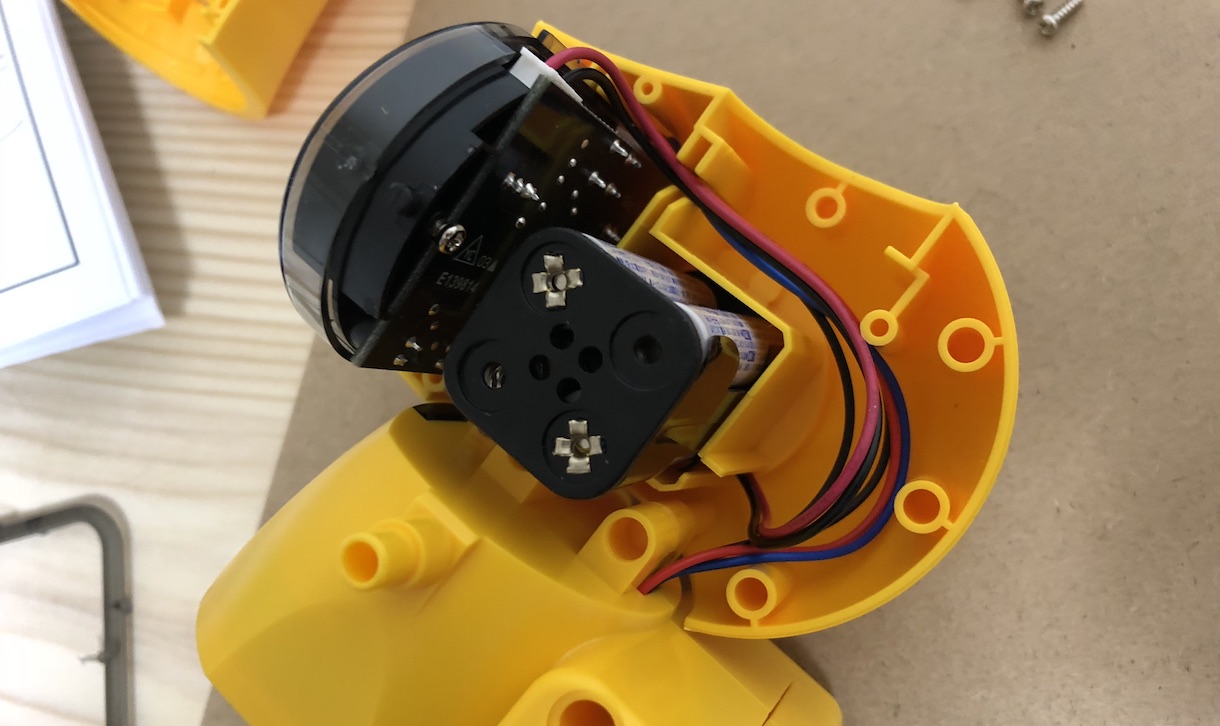
ケーブルを挟んでしまわないように、きれいに収めましょう。電池の格納場所は頭の中心。美しい設計を楽しみながらの楽しい組み立て。

組み立ては簡単、1時間でFOLO完成!
Nitendo Laboで組み立てレッスンした子供へのステップアップにもちょうどいい!
LEDを使った光る目の演出と、音の使い方がかわいい!
赤外線センサー2つで手を認識して付いてくるモードと、障害物を避けつつ動きまくるモードをオデコのボタンで切り替える。
ロボットなので、やっぱり自分でプログラミングしたい!
ドライバーでネジを外し、小さなマイナスドライバーを使いながら身長に顔部分を外せばすぐに制御部分にアクセスできます。 基板に接続されているモーター、電源もどちらも2.54mmピッチなのでラクラク改造。元に戻すことも簡単です。
IchigoDakeとIchigoIgaiで開発、モータードライバ基板は以前の「IchigoJam Tank 2」を、単4x4の電源から3.3Vを作るのにはIchigoJamのレギュレーターをそれぞれ流用。 IchigoJam + こどもモーターボード MapleSyrupの組み合わせも簡単なのでオススメ!
モーターの動作テストはこのように(少し転回か、歩くか、どちらか動きます)
OUT1:WAIT30:OUT0
ぐるぐる走らせるプログラムはこちら(時々ちょっと停止)
10 OUT1:WAIT30 20 OUT16:WAIT30 30 IF RND(4)=0 WAIT60 40 GOTO 10
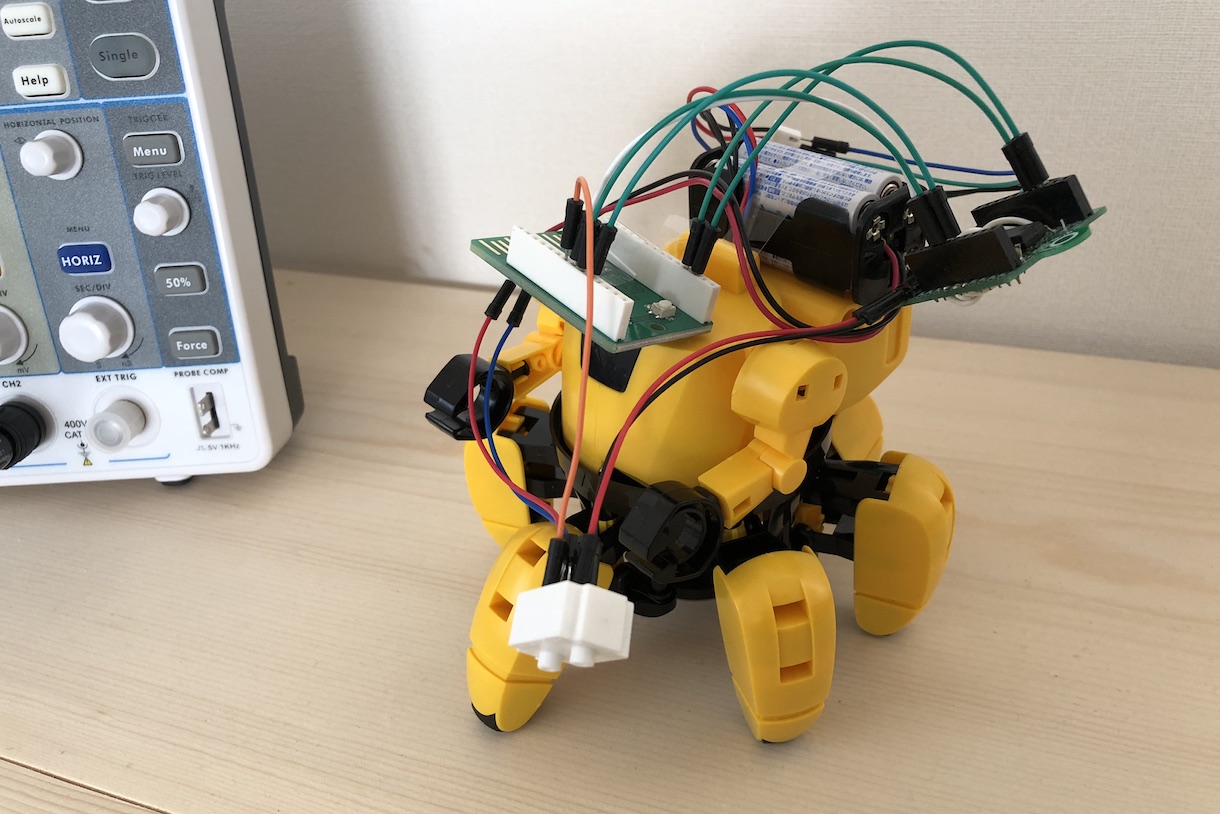
IchigoDakeだけにして、ボタンを押しながら3.3Vの電源をつないで自律走行ロボットのできあがり。
オリジナルな頭部分をダンボールや、3Dプリンターなどで、工作したり、塗装するとオリジナリティーあふれる自分だけのロボットが作れそう。
センサーや追加の上下を見渡すサーボ、ネットを加えてIoT化など、いろいろ加えるともっと楽しい。
スマホを乗っけて、家の中を警備してもらうのもいいかも!
links
- フォロ [ MR-9107 ]|製品情報 | エレキット (4,104円 at Amazon)
- こどもモーターボード MapleSyrup
- IchigoJam Tank 2 featuring ai.shuttle.jam - 動く魅力!



{kind=link}
{kind=link}
{kind=link}