高志中サイエンス部のみんな!
はんだづけからはじめるプログラミング入門。その間に、上級者向けレクチャー、世の中には無料で使える楽しいおもちゃがたくさん!オープンソース、オープンデータ、IoT、思う存分遊びましょう!
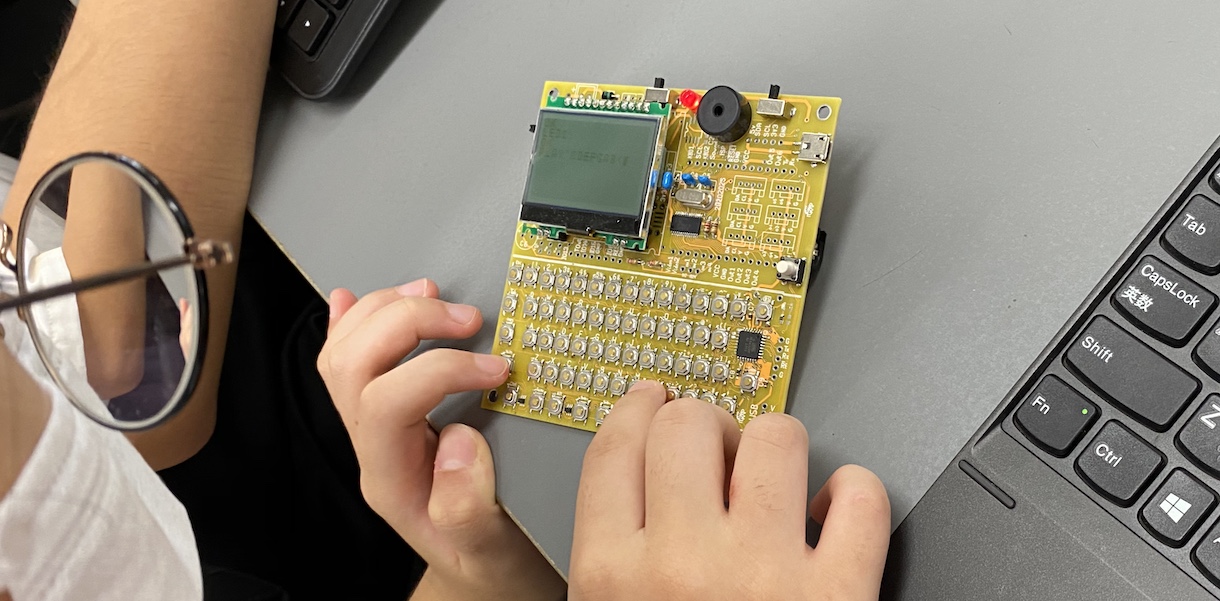
はんだづけできたら、LED1、やった光った!(LEDを最初反対に付けてしまったのを手術し修正後)
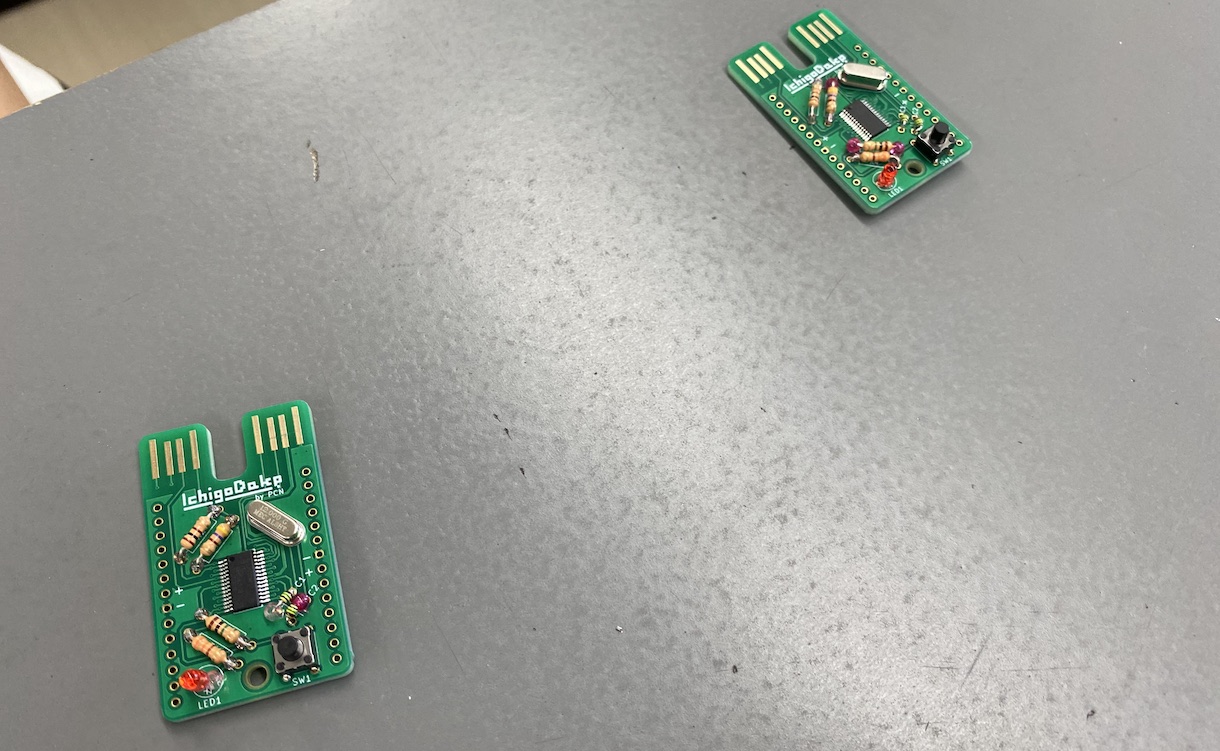
ビーズでかわいくオリジナルIchigoDake!(ビーズで飾る電子工作)

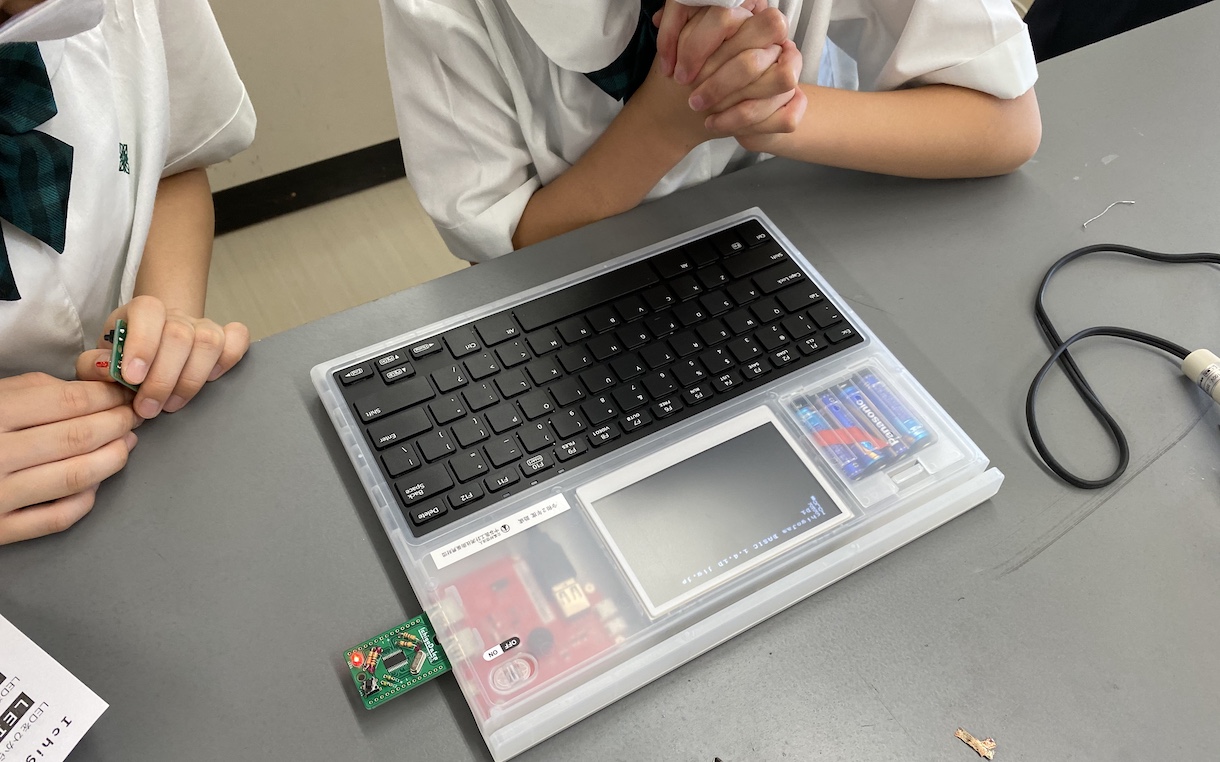
早速、IchigoJamでゲームづくり!
IchigoJamプリントや、IchigoJam教材スライドもオープンデータとして公開しています。
教材づくりへのチャレンジもぜひ → 33ステップで解説、GitHubオープンソース貢献入門 IchigoJamプリントをつくってみよう
IchigoJamで、ペアプログラミング!楽しさ2倍!?
経験者チームは、持っていったいろんなおもちゃで思い思いに遊ぶ。
オシャレな画面と共に、ランダムに奏でるIchigoJamプログラム!
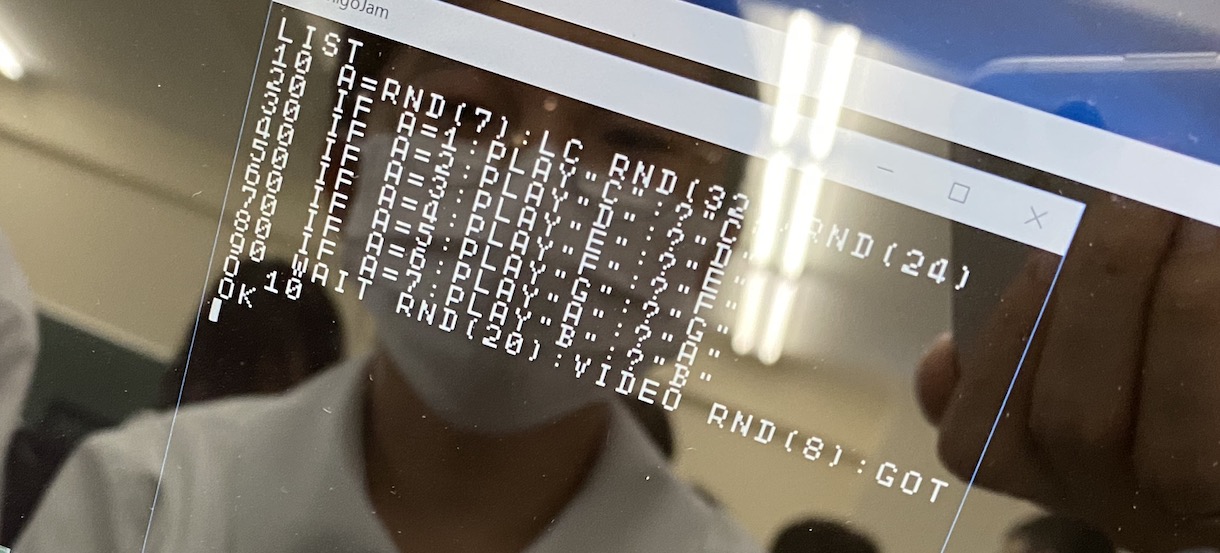
VIDEOのパラメータをRNDにするのが斬新!
PCN上田発、ハンドスピナー型IchigoJamをPC冷却ファンをMapleSyrupで制御して、回してた!
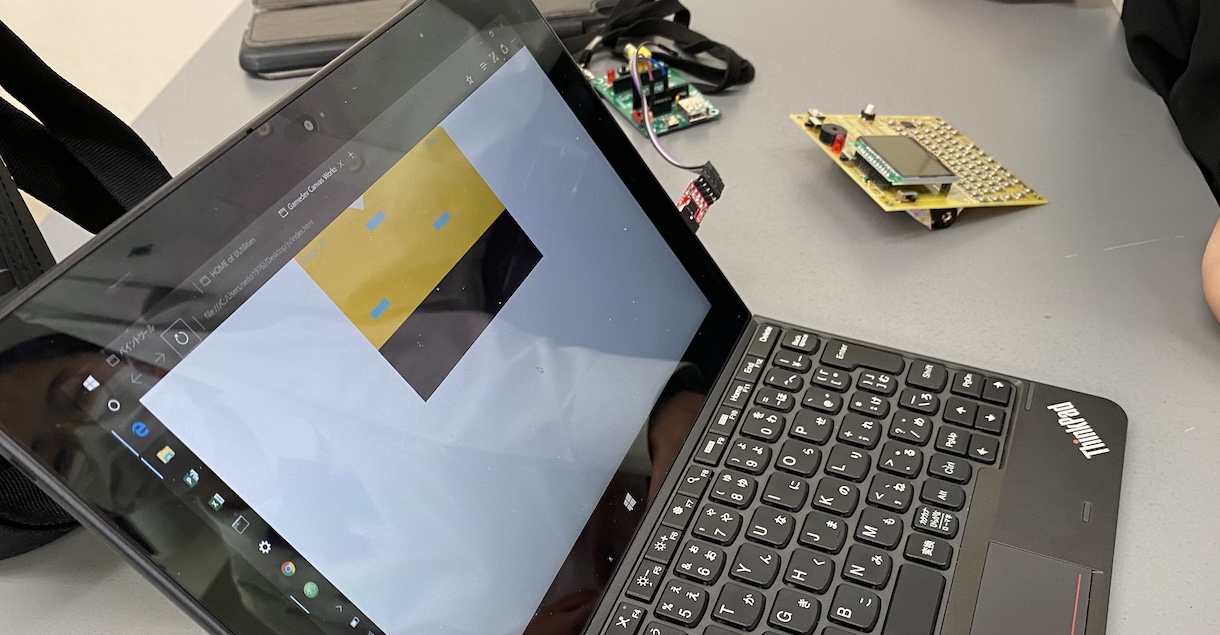
JavaScriptで改造したカオスなブロック崩しゲームを見せてくれました。
物理エンジン使うと、また楽しいものがつくれるよ!

缶サット、昨年度の取り組み「模擬人工衛星の挙動制御と構造的工夫」を紹介してくれました。
今年は地面のマーカーにめがけて着地制御にチャレンジしたいとのことで、使用するセンサーの相談。
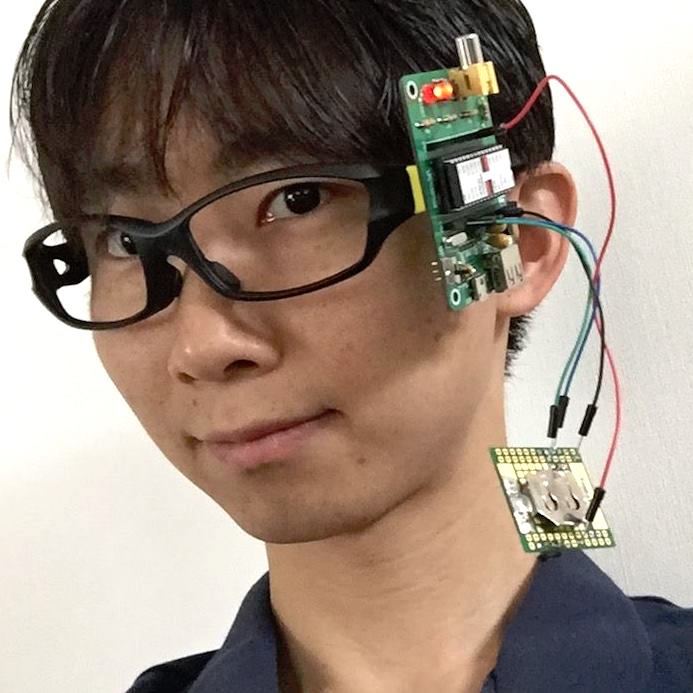
今オススメは、RISC-V 64bit x 2coreのカメラ付きモジュール、M1n!
USB-Cでパソコンと接続し、rshellをセットアップ(初回だけ)
sudo pip3 install rshell
rshellコマンドで接続(usbeserialのあとの番号は自身の環境に合わせる)
rshell -p /rshell -p /dev/tty.usbserial-xxxxxxxxx0 edit /pyboard/flash/boot.py
viが起動するので、microPythonでプログラムを貼り付ける
import sensor import math sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) sensor.run(1) green_threshold = (50, 80, -70, -10, -0, 30) #red_threshold = (40, 80, 30, 70, 0, 40) fm.register(20, fm.fpioa.UART2_TX) fm.register(15, fm.fpioa.UART2_RX) uart = machine.UART(machine.UART.UART2, 115200) print(0) while 1: img = sensor.snapshot() #blobs = img.find_blobs([red_threshold]) blobs = img.find_blobs([green_threshold]) if blobs: for b in blobs: print(b.cx(), b.cy()) #n = ((b.cx() // 2) << 8) + (b.cy() // 2) x = b.cx() / 320 * 100 y = (b.cy() + (320 - 240) / 2) / 320 * 100 n = math.floor(x) * 100 + math.floor(y) uart.write(str(n) + "\n") break time.sleep(.1)
「:wq」エンターと押して保存。これで書き込み完了!
M1nの20ピンをIchigoJamのRXDへ、M1nのGNDをIchigoJamのGNDへ、接続。

秋月電子の3Vで動くサーボと、AIカメラモジュールを組み合わせます。

IchigoJamでのプログラムはこれだけ!
シリアル信号で受信したXY座標をまとめた4桁の数が送られてくるので、100で割ったX座標のみを使って、サーボを動かす!
サーボに貼り付けたAmabieDakeが緑色を見せる場所に合わせて傾きます。
缶サット、空中での移動はどう実現するか?いろいろ試してみるのがおもしろそうですね。
マーカーの認識は、green_threshold のパラメータで微調整します。
IchigoJamのPC接続のように、M1nにシリアルで接続し、Ctrl-C で��動作を停止、プロンプトがでてくるので、下記コマンドで自動起動するプログラムを一旦消して、再度書き込みましょう。
os.remove('boot.py')
IchigoJamでのソフトウェア、制御するハードウェア、M1nのmicroPython、いろいろ分担して取り組んでみよう!
IchigoJamでコントロールするドローン、TELLOを使った実験中とのこと!
今回、声をかけてくれた前田くん、高志中サイエンス部のWebサイトがいい感じ!
(IchigoJam 1.4のWS.LED命令についてかいてくれてます!)
ぜひいろいろ作って、オンライン、オフライン問わず、バンバン発表して、見てもらう人増やしましょう!(NT鯖江もよろしく)



{kind=link}
{kind=link}
{kind=link}