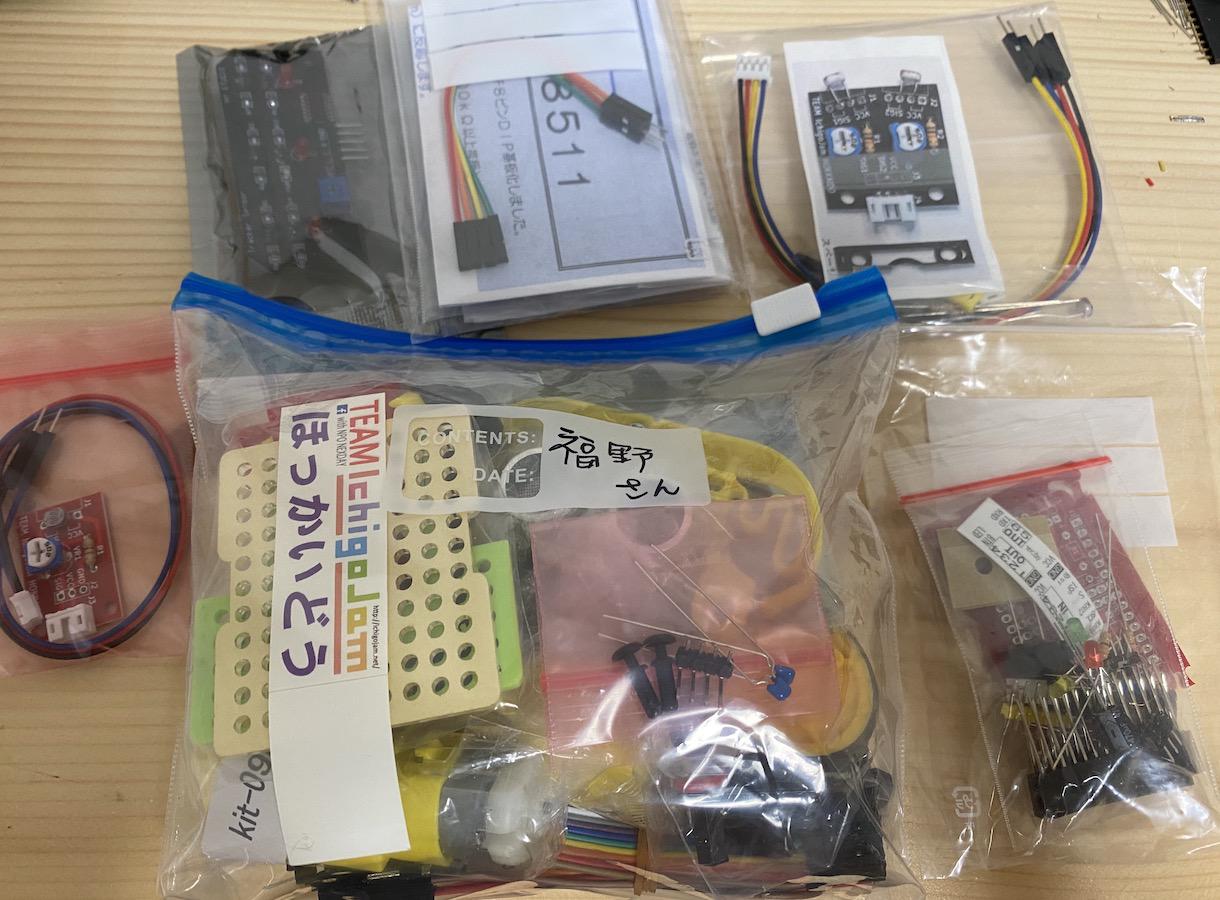
たくさんのわくわくする部品!
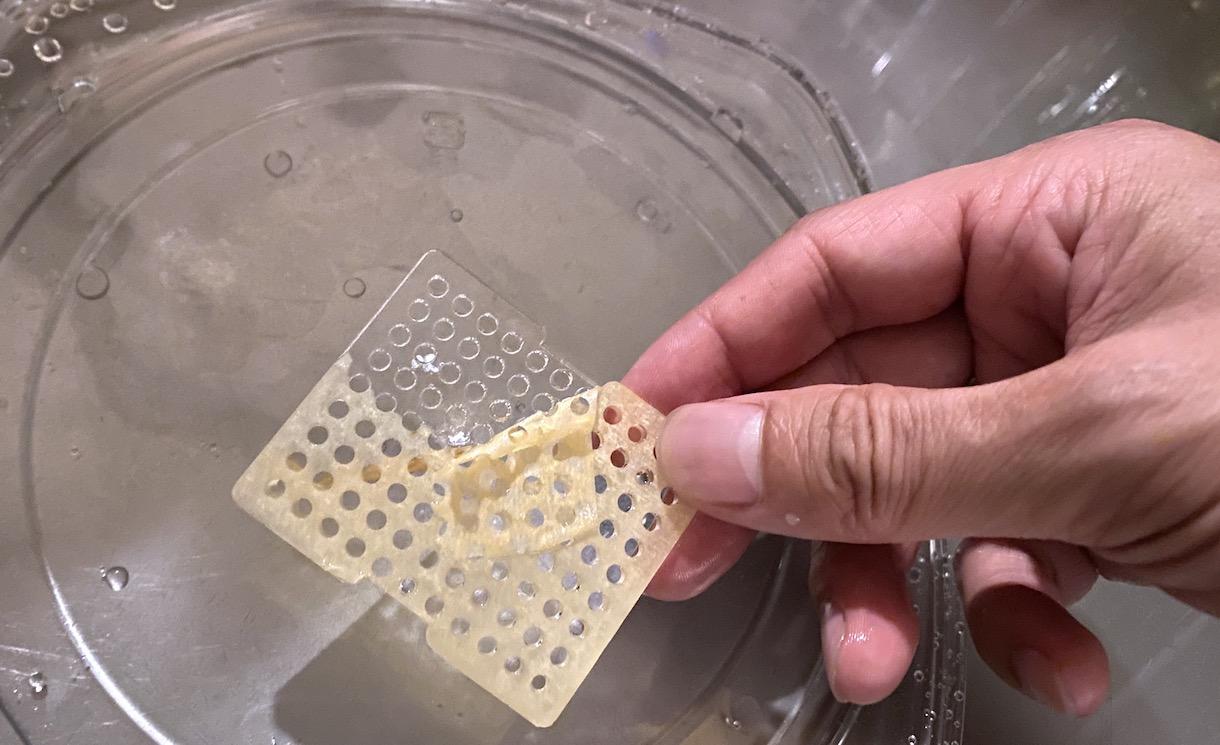
レーザーカッターで切り出したシャーシは、水に浸けておきましょう。5分もすれば、するっとむけます。
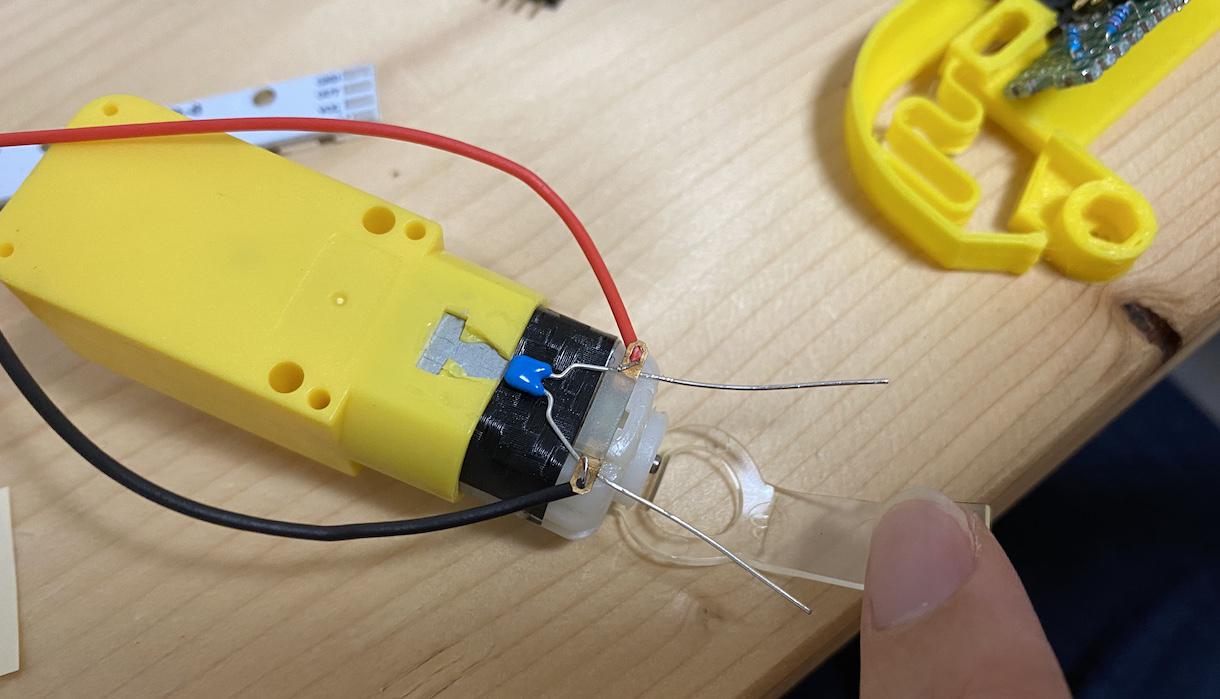
金属のモーターの外枠に接してしまわないよう絶縁用のテープを貼り、モーターにはノイズ対策コンデンサと合わせてはんだづけ。
モーターモジュールの組み立てます。
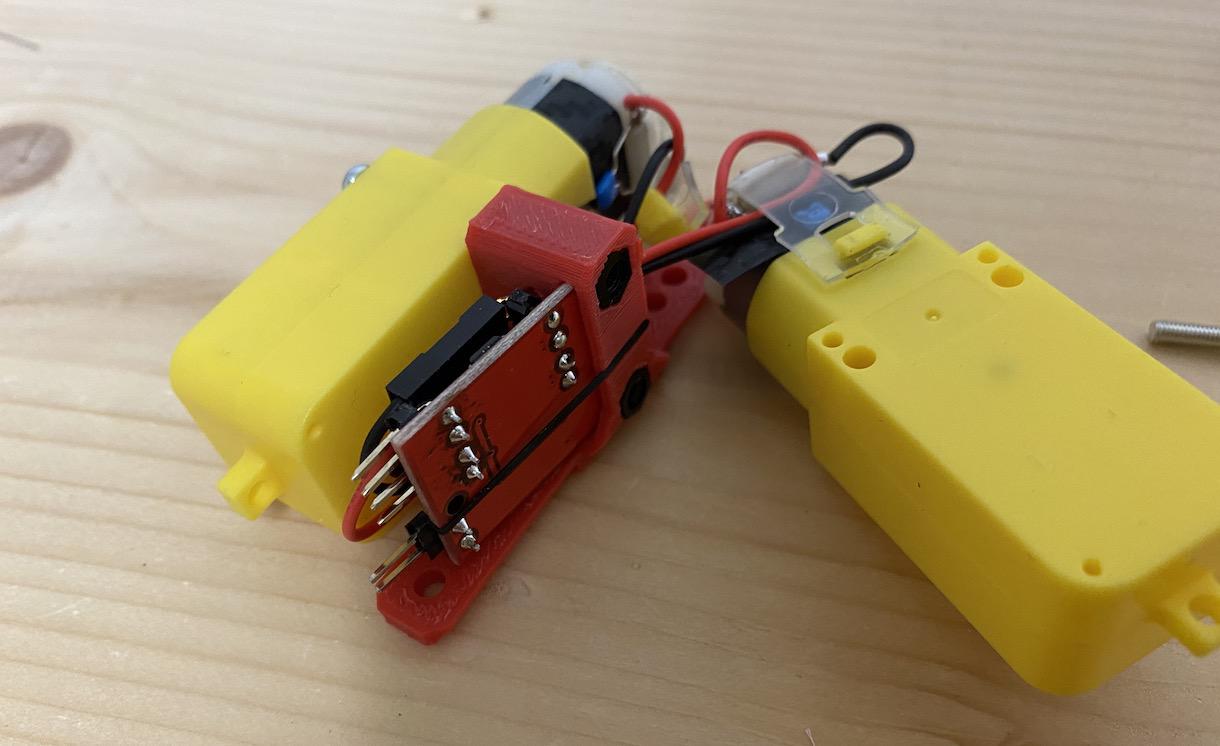
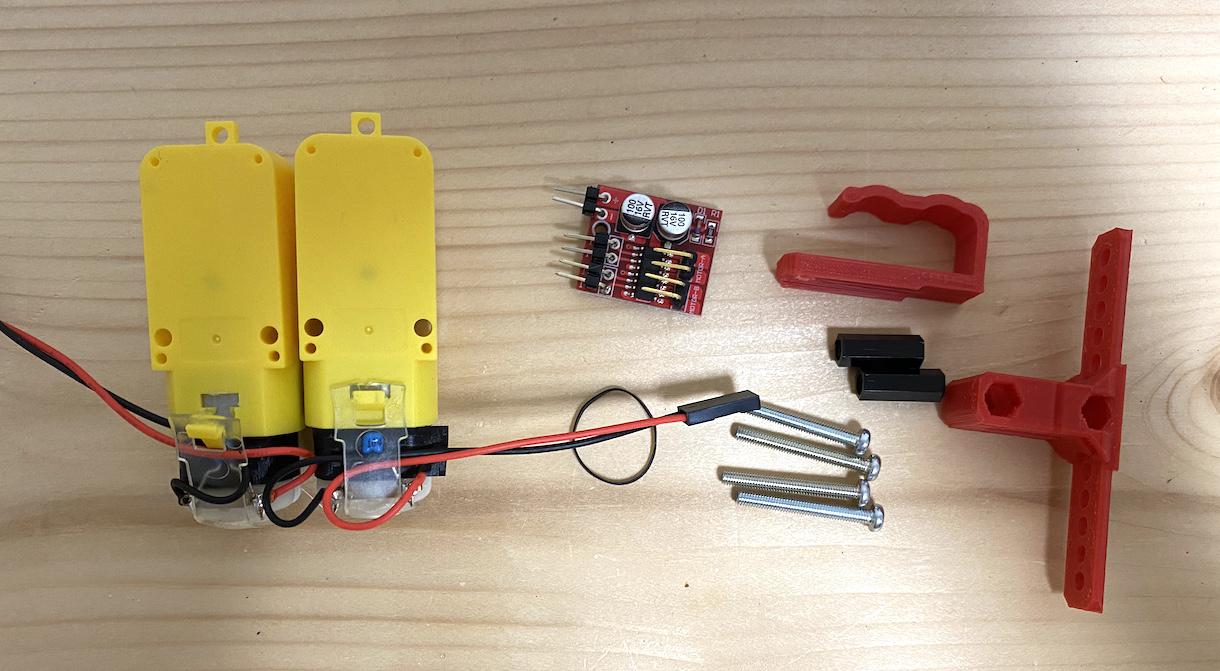
モータードライバの基板はモーター間の隙間、3Dプリンターで作った筐体内にくるっと格納!
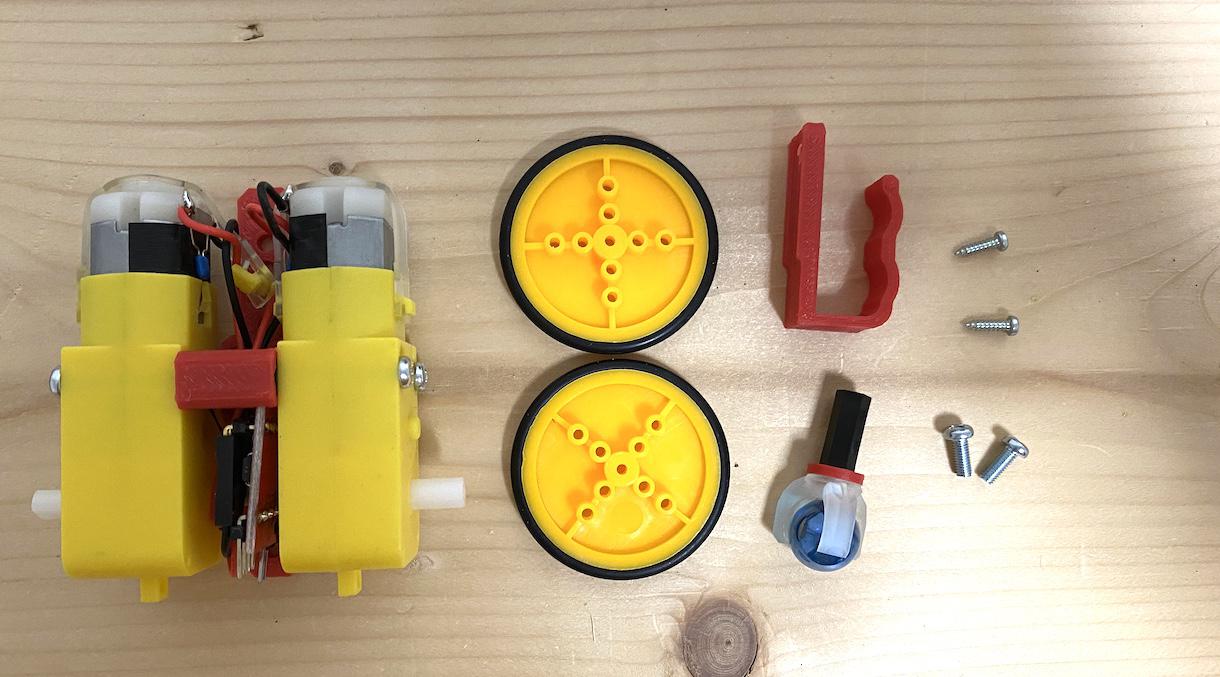
タイヤを付けます。ビー玉を光造形3Dプリンターで作ったと思われる、3輪目モジュールがすごい。
単4電池x2の電池ケースを格納する場所。
シャーシを組み立てていきます。
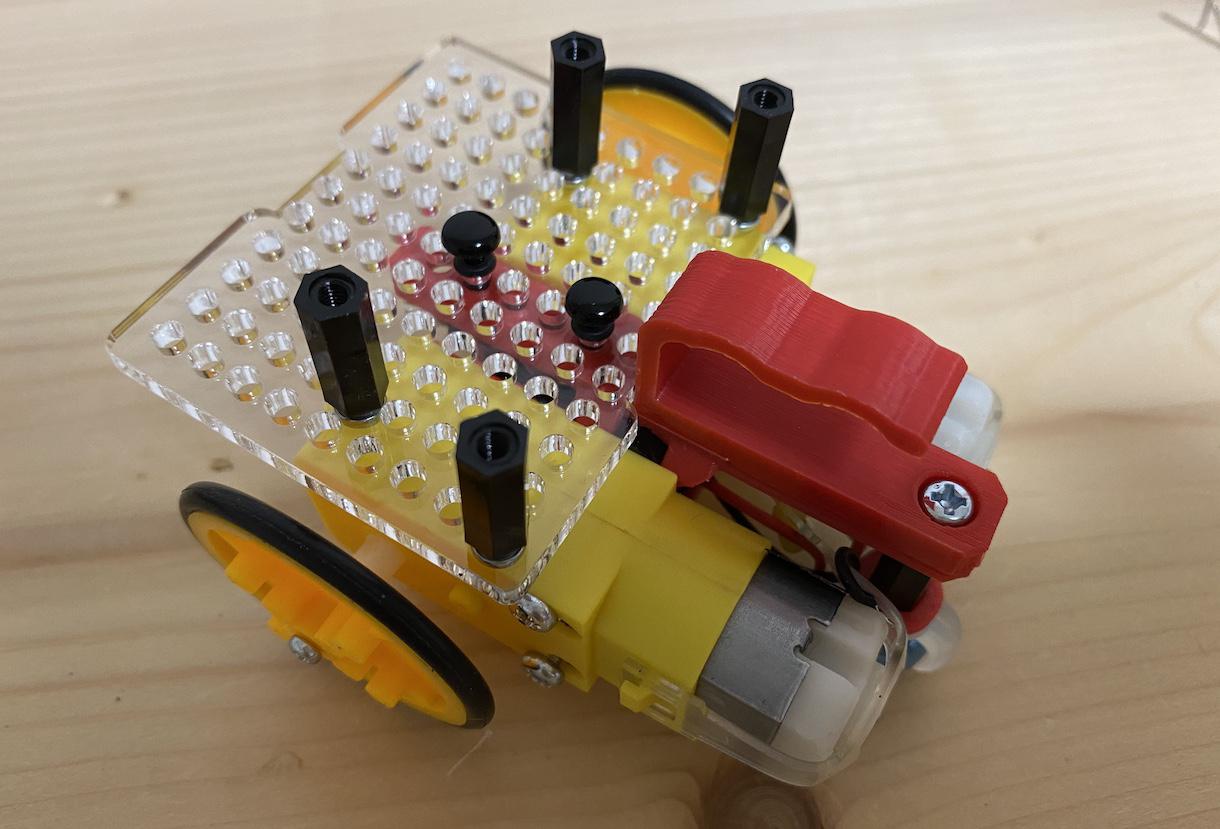
プッシュリベットが便利!
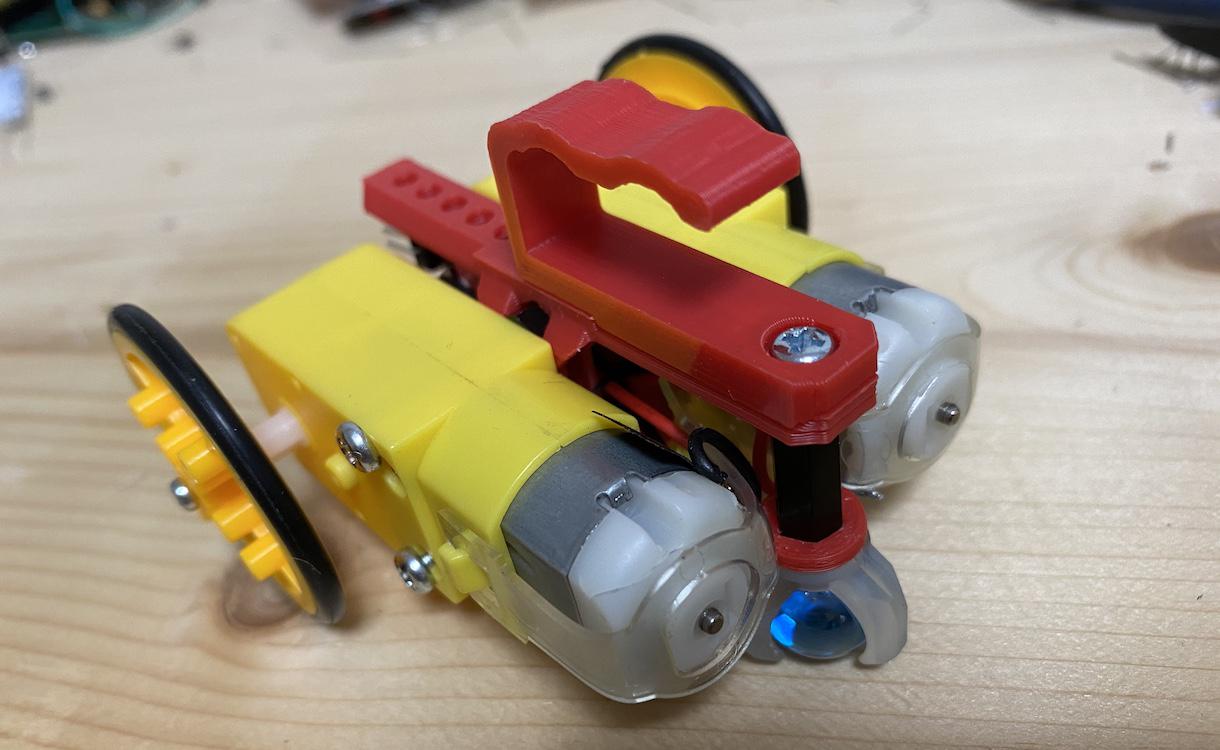
IchigoDakeを乗っける場所ができました。

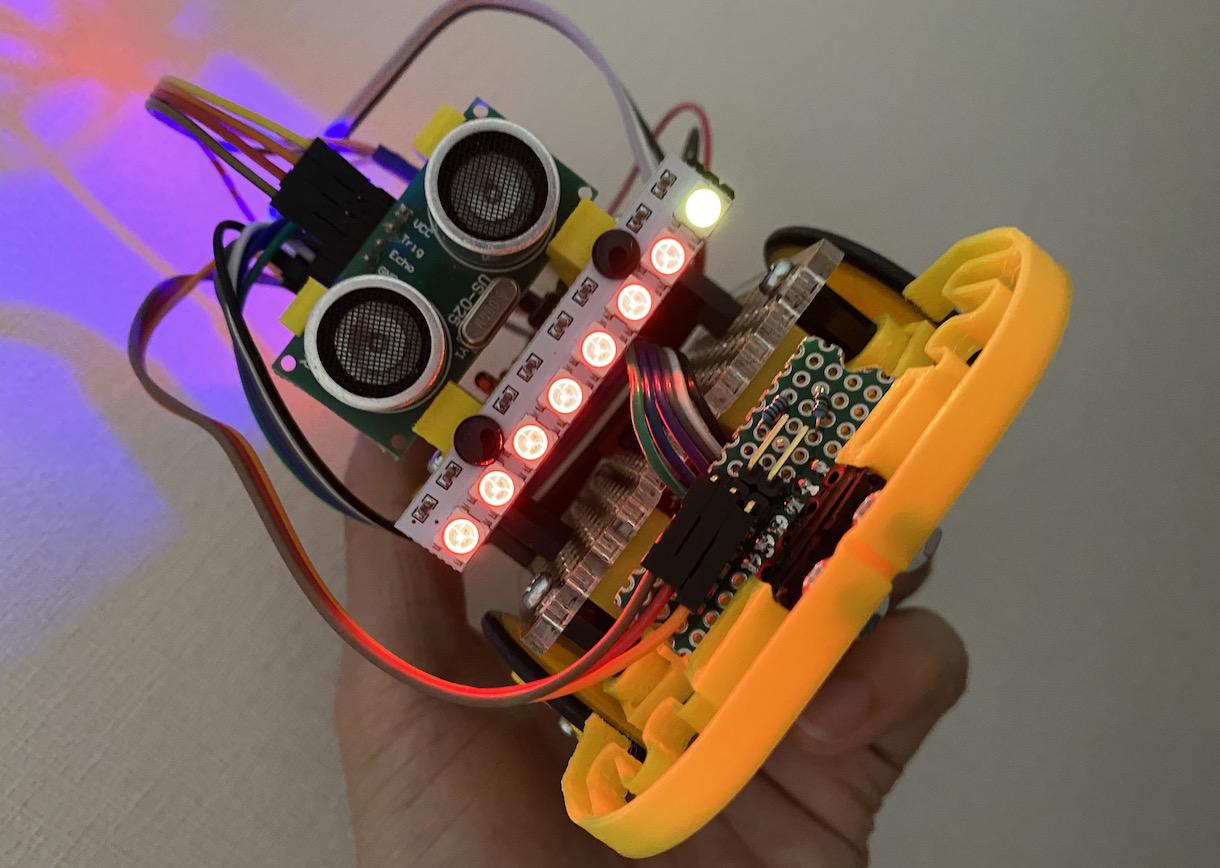
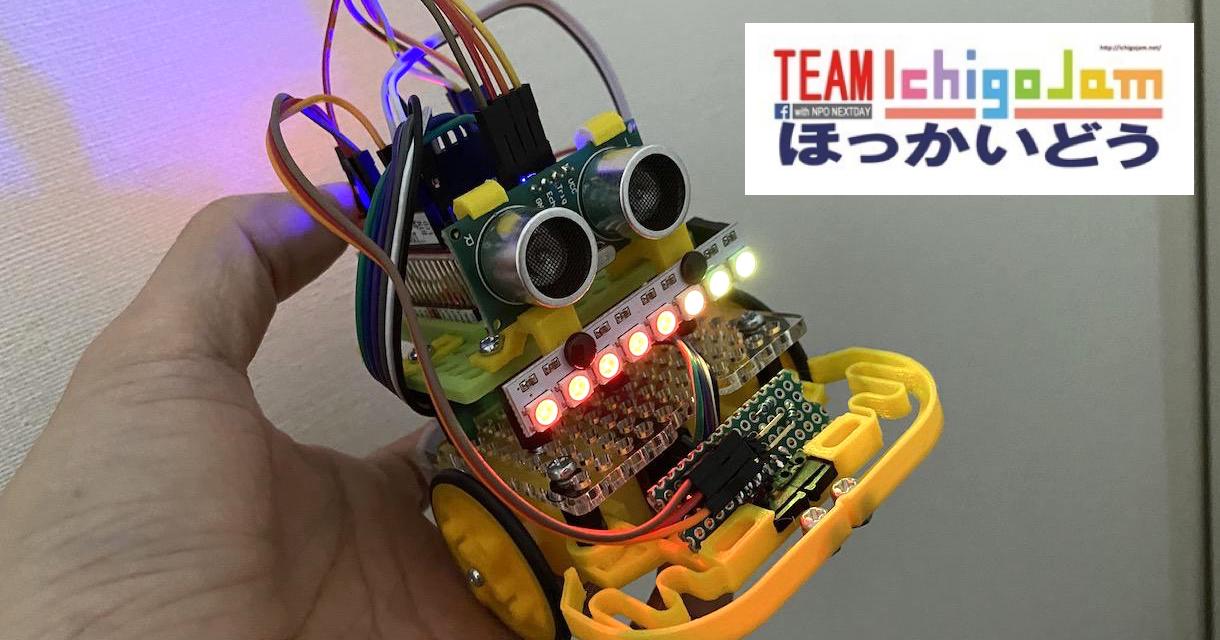
ロボットの目となる超音波センサーと、ロボットの口(?)として表情伝える8連LED。
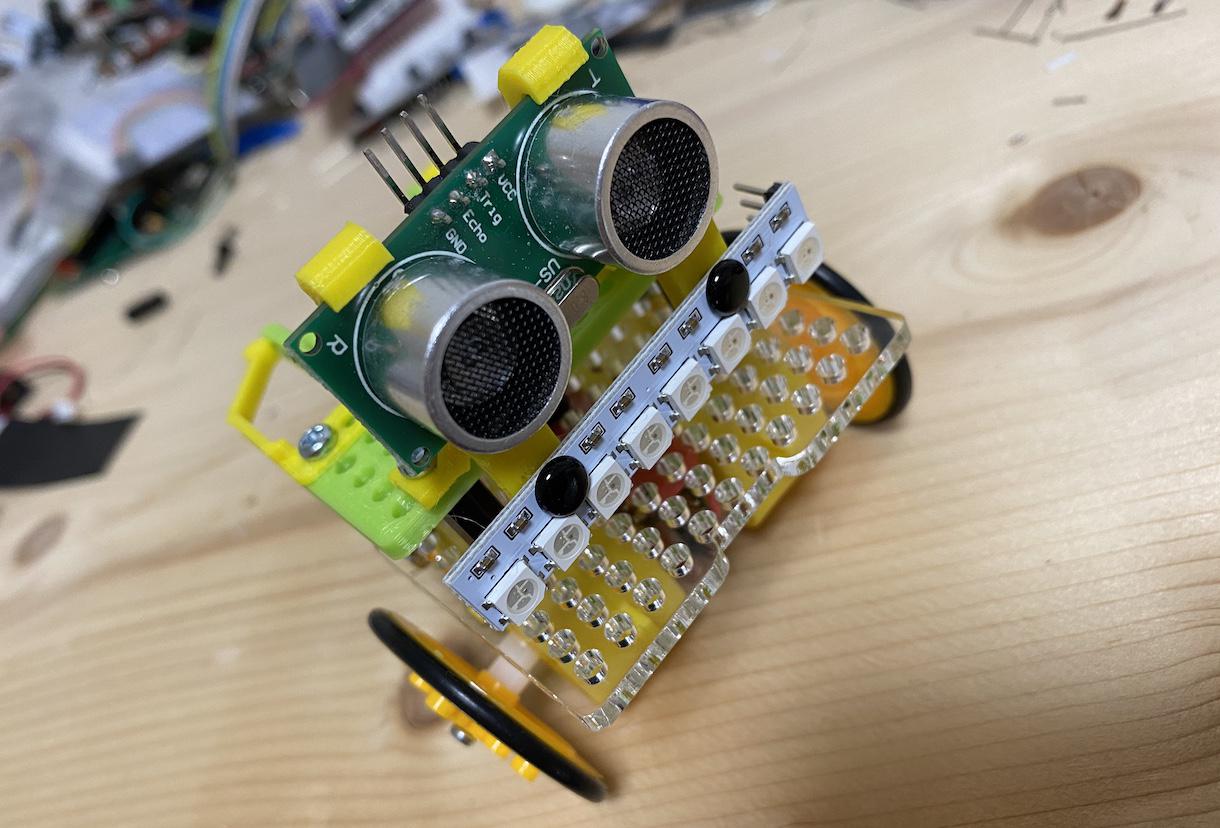
目と口が付いてかわいい!(すみません、8連フルカラーLEDの取り付け向きが上下逆でした!)
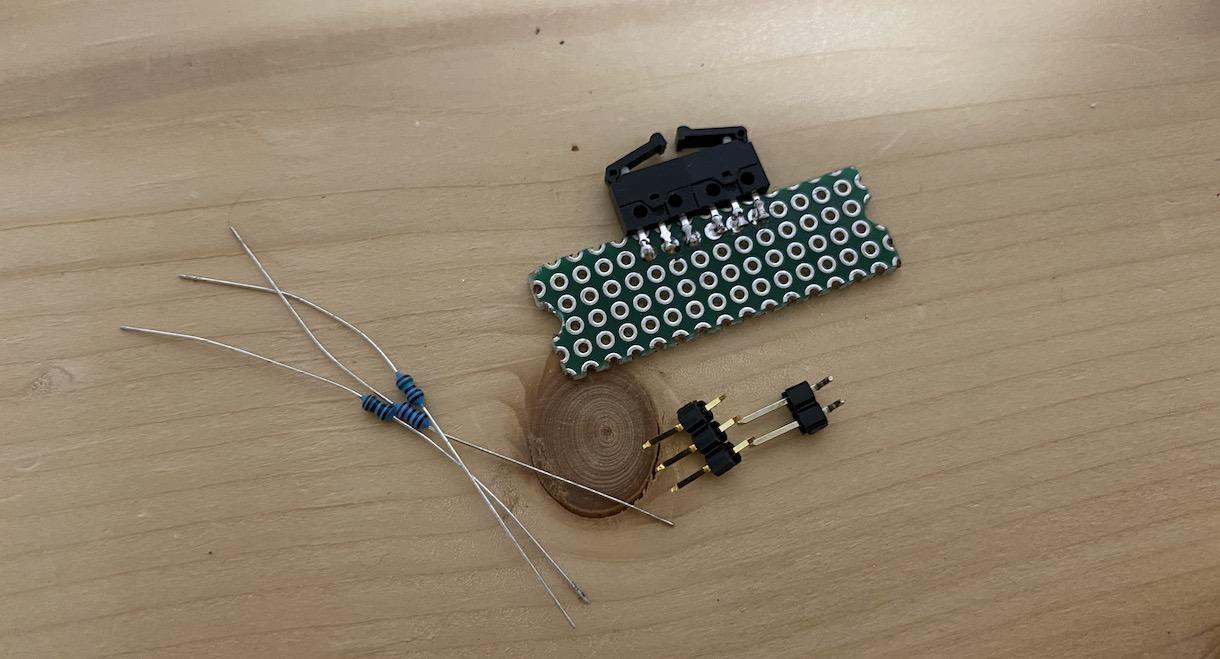
バンパー基板は製作中とのことで、ユニバーサル基板とスイッチはんだ済みのバンパー用の部品。
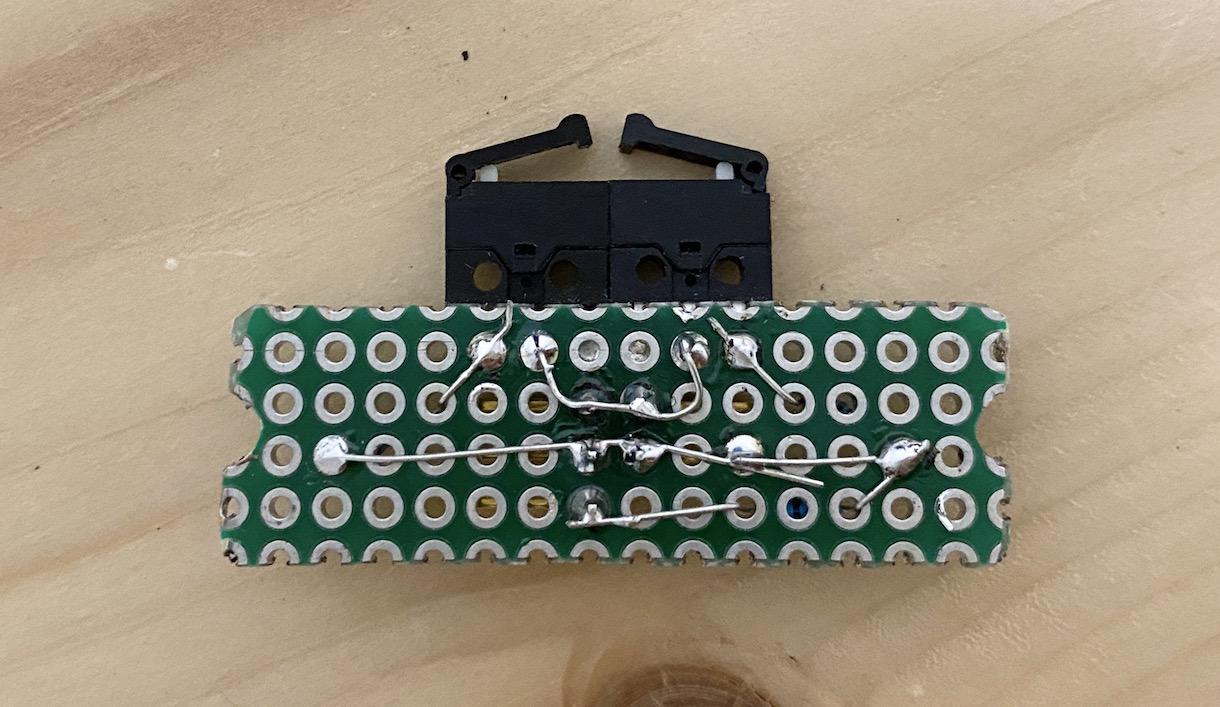
バンパーモジュールの裏面。抵抗はしでのはんだづけも楽しい!
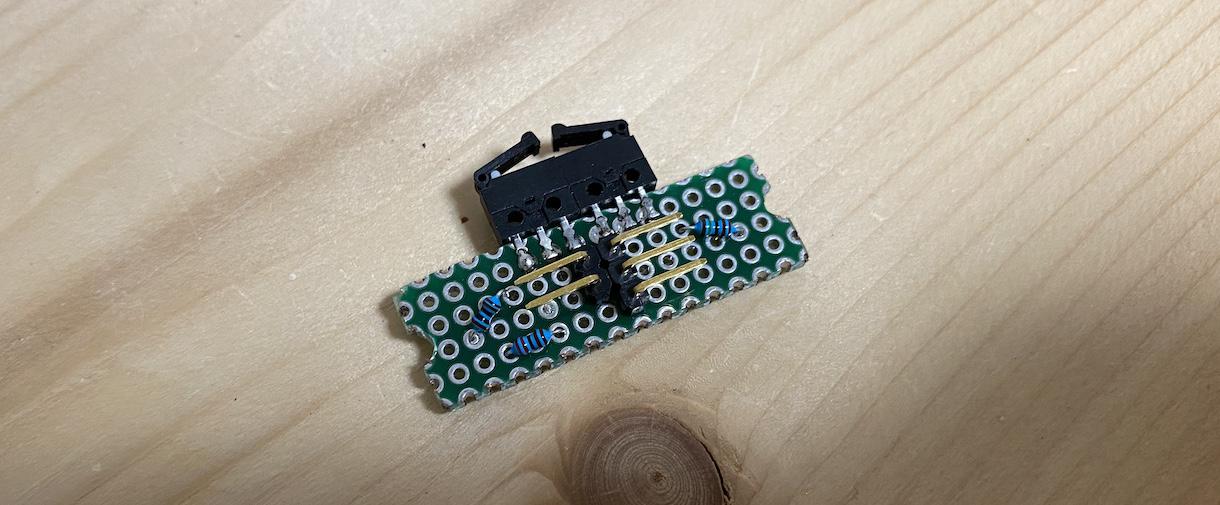
バンパーモジュールの表面。
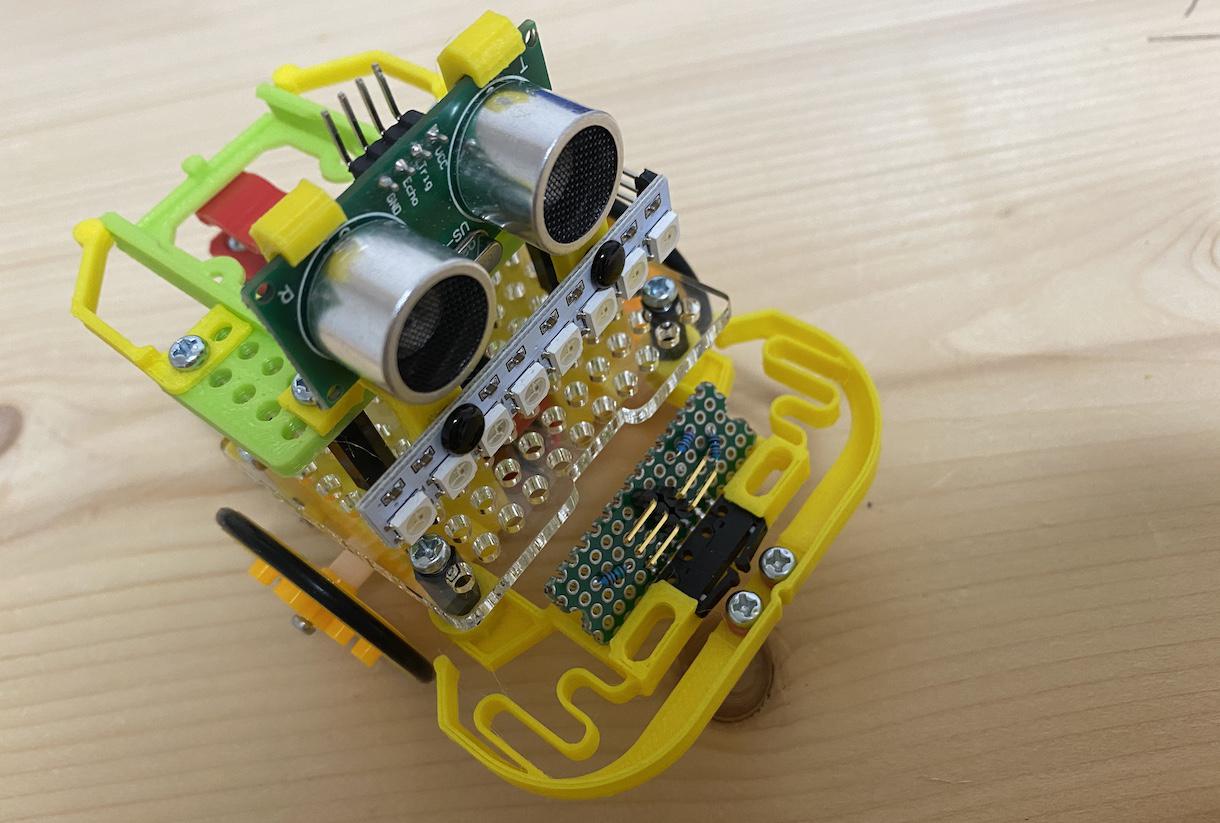
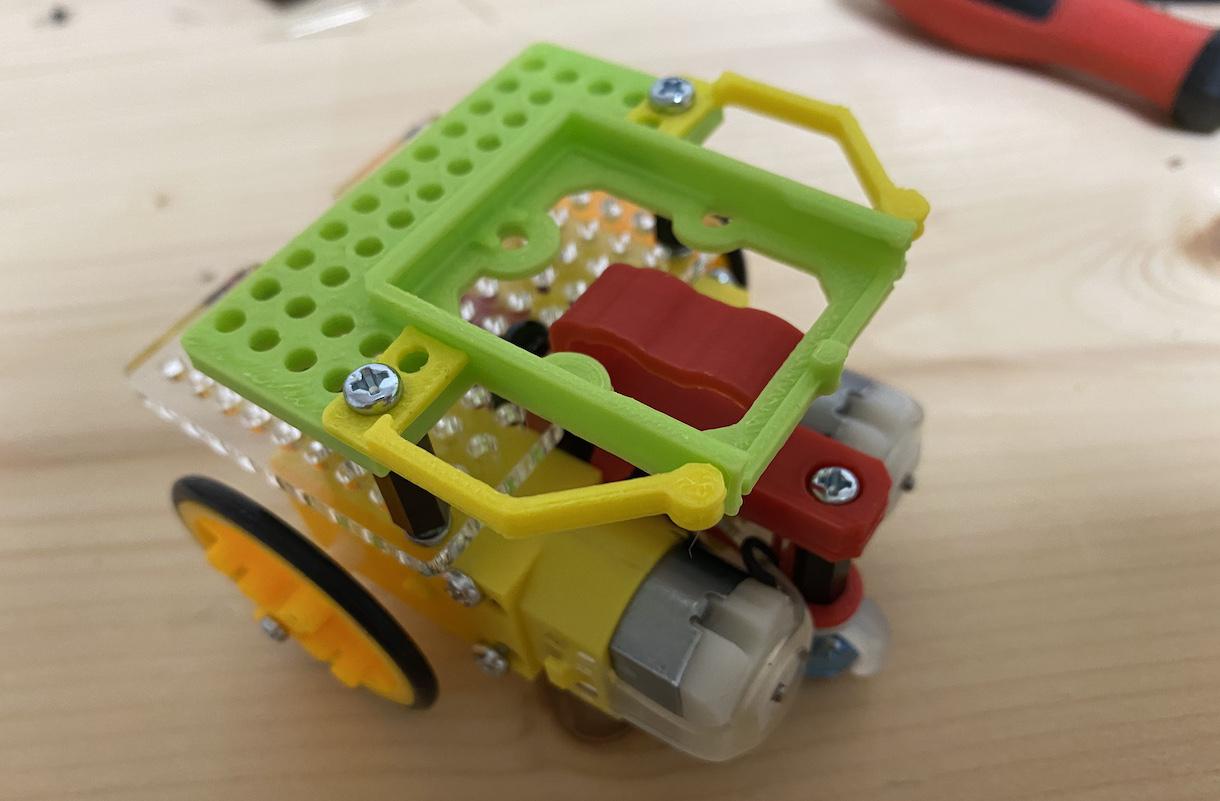
ロボット筐体ができました!

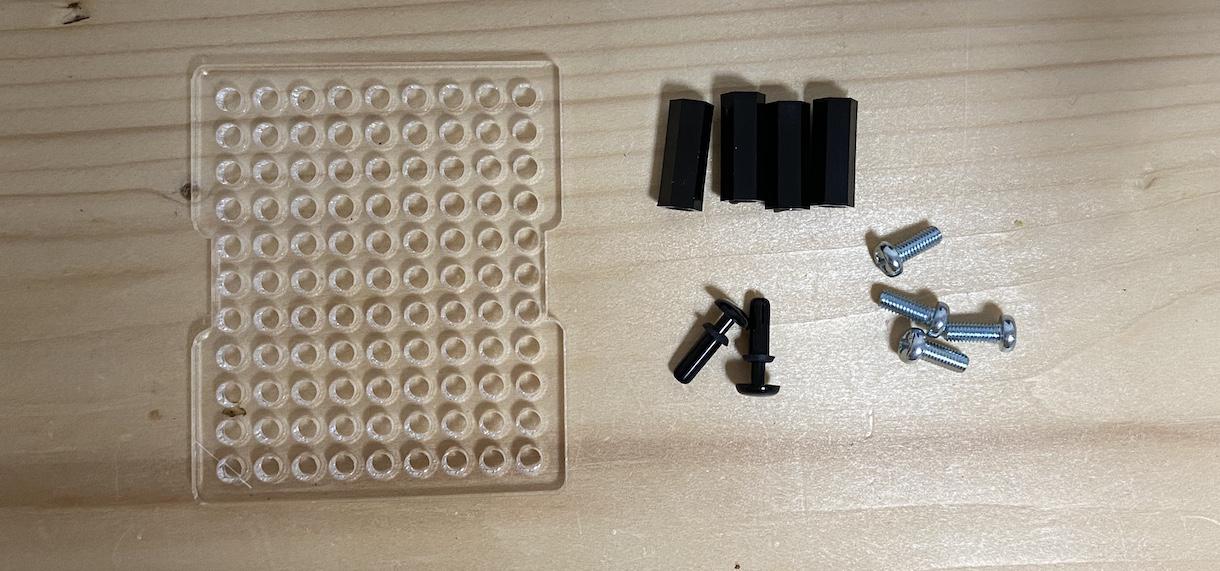
続いて、IchigoDake(またはIchigoJam)に接続するベース基板の部品群。
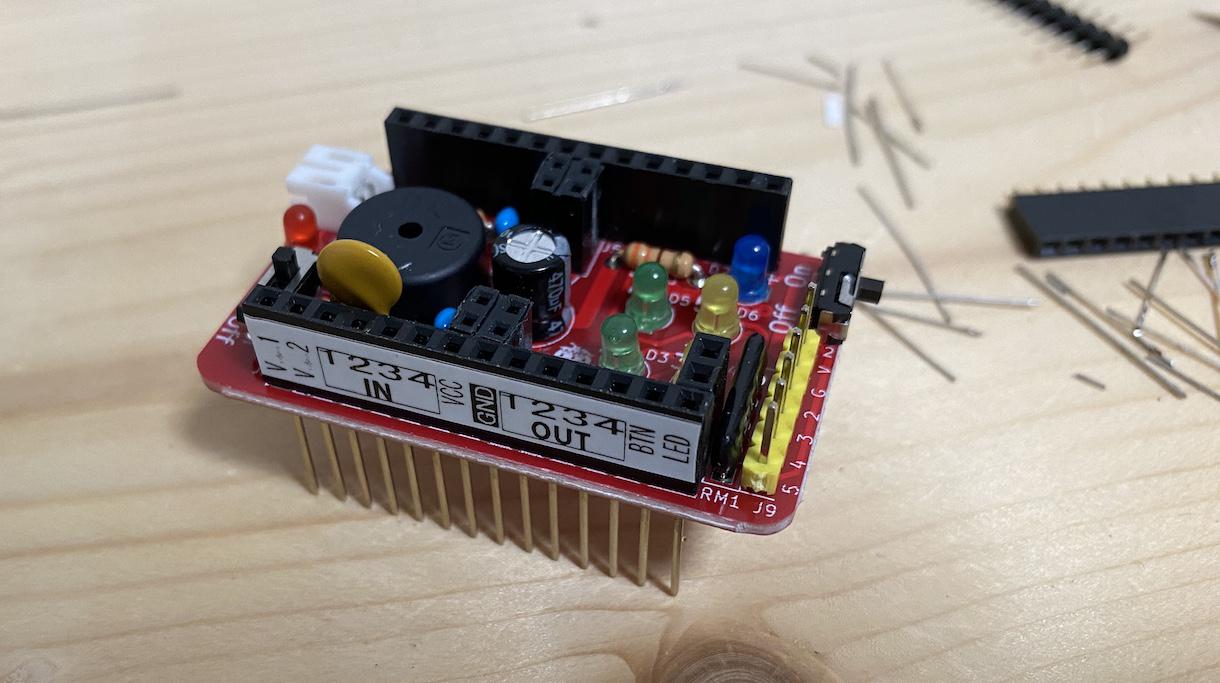
楽しいはんだづけ、25分ほどで完成!よく使う電源ピン(VCC/GND)が増設されてます。
左のスイッチは電池を電源として使う用。ロボットとして動かしている時は停止に使えます。
右のスイッチはモーター用。テスト中はモーターの動きを4つのLEDで確認し、実際には走らせなくてもテストできて便利!
あとは、説明書どおりに配線したらできあがり!

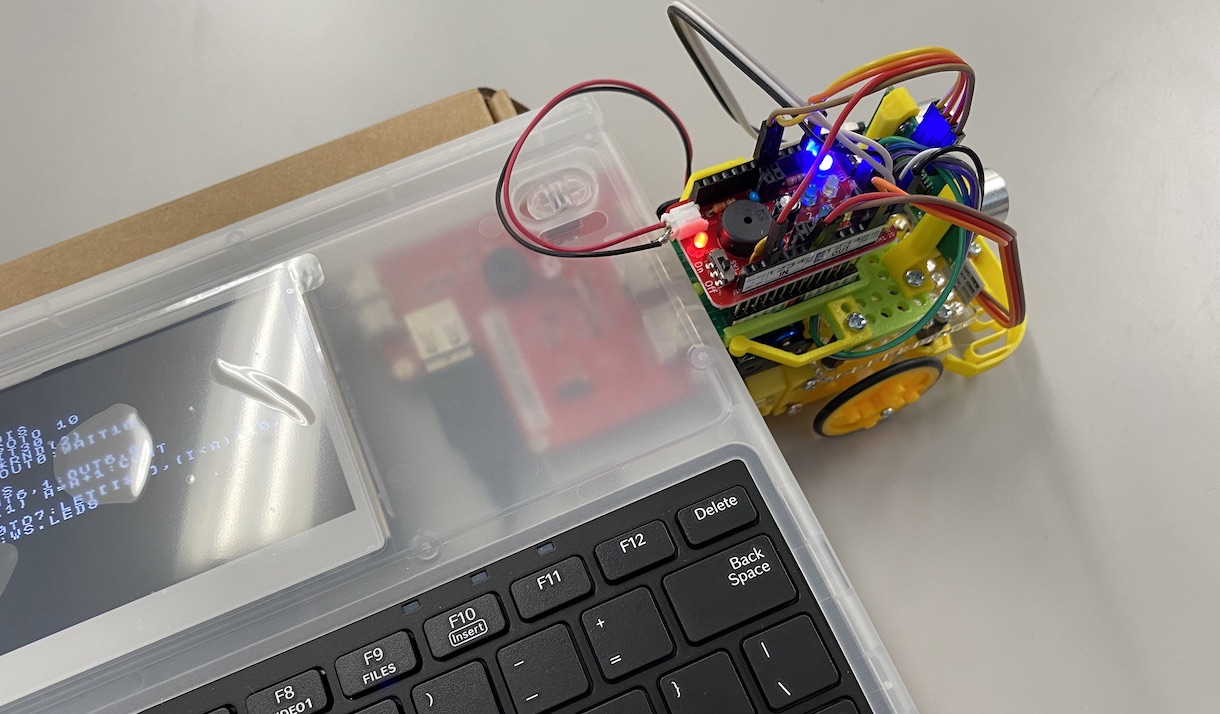
IchigoDakeにIchigoIgaiを挿してプログラミング!
先頭行に @ARUN をいれておくと、自動起動します!(ver 1.4)
1 @ARUN 10 OUT10 20 GSB@GETDIS 30 IF A>1 GOTO 10 40 OUT0:WAIT30 50 OUT12+6*RND(2) 60 GOTO10 300 @GETDIS 310 A=0:OUT6,1:OUT6,0 320 IF IN(1) A=A+1:CONT 330 ?A 340 FORI=0TO7:LET[I*3],(I<A)*10,10,0:NEXT:WS.LED8 350 RTN
OUT10で前進。センサーが反応したら、OUT12かOUT18、ランダムに右左行って、繰り返し。
300行からの@GETDISで、超音波センサーから距離を取得しつつ、LEDの色で反応した距離を表示するBASICプログラムです。
マシン語化したり、VIDEO0で高速化すると、もっと細かく取得できます。
こんな感じに動きます!
口のように見える?光でプログラミング表情、おもしろい!
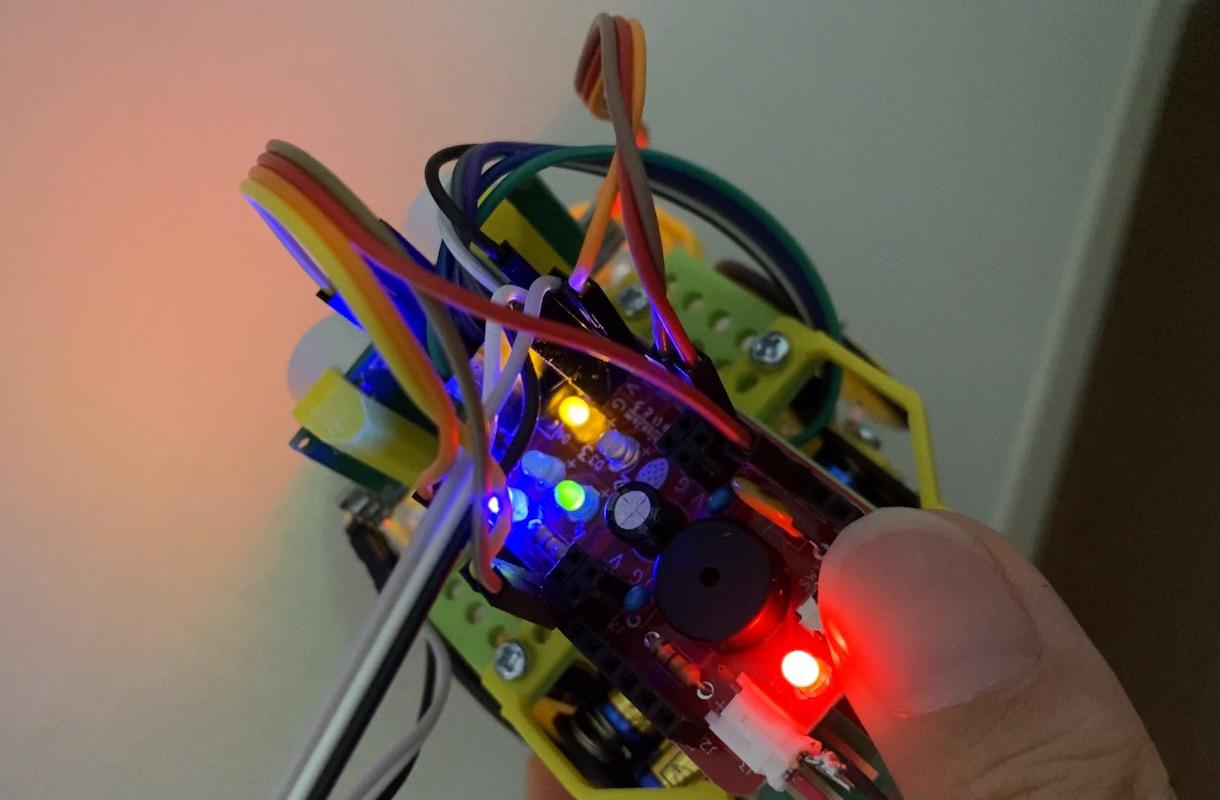
右前と左後ろのモーター作動を知らせるLED。
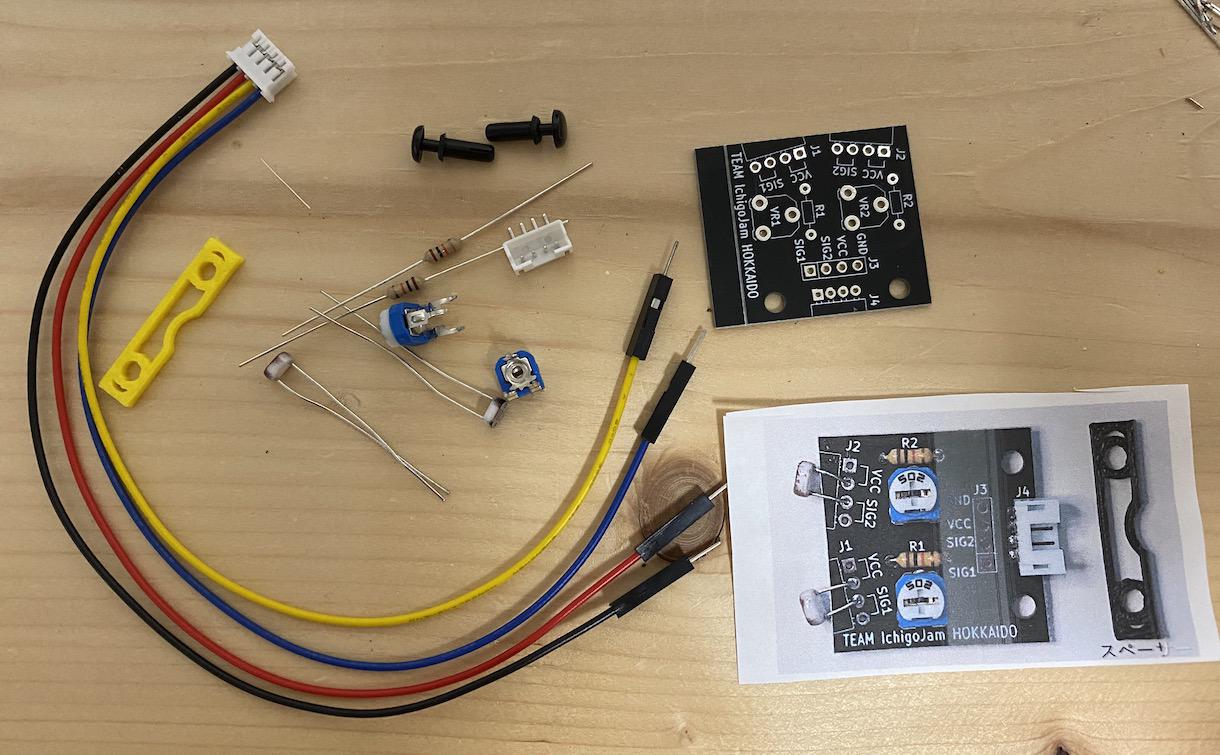
拡張モジュール、2方向、光センサー基板!
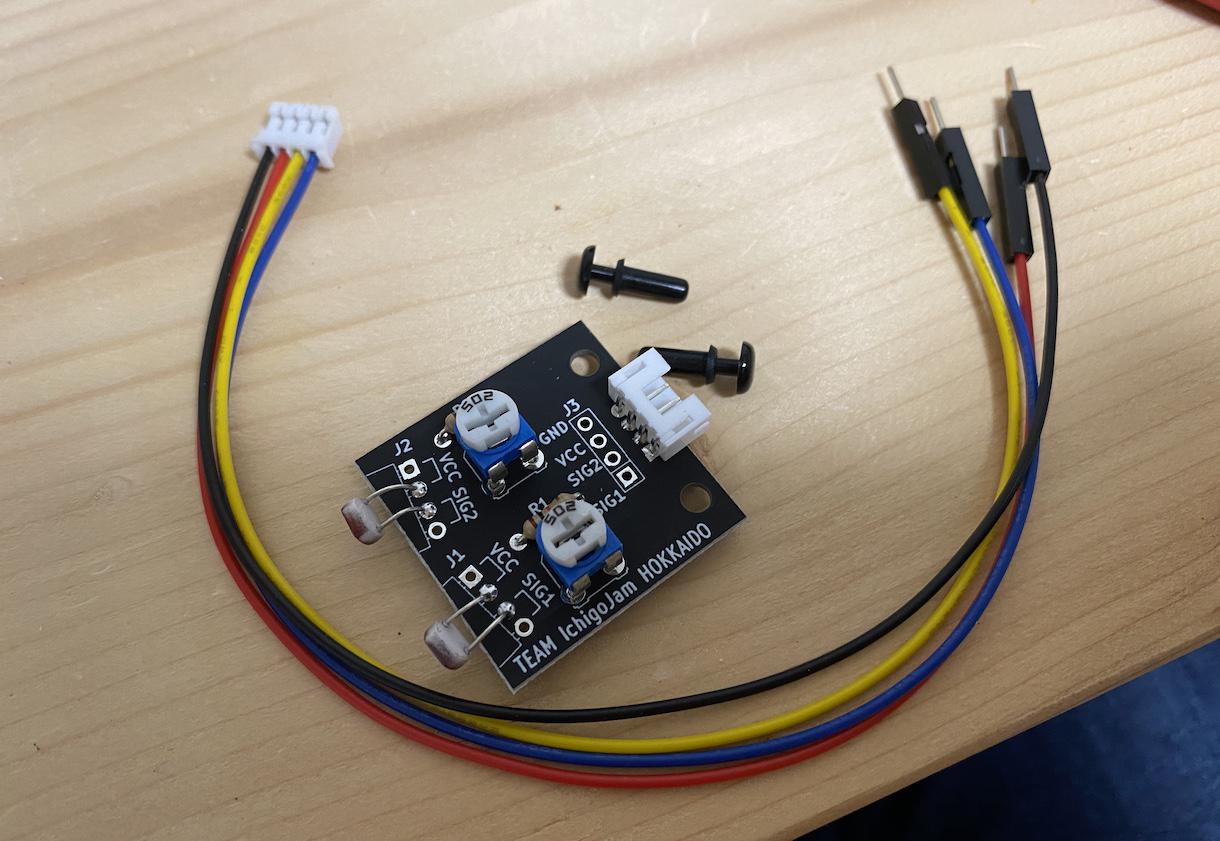
いろんな制御で遊べそうです!
IchigoIgaiの代わりに、IchigoDyhookの下にIchigoDyhookの箱などで少し高くして、新JAMCARを直接接続もいい感じ!
正式版、公開、楽しみですね!
TEAM IchigoJamほっかいどう 2019 – nextday programming kids
links
- IchigoJam – nextday programming kids



{kind=link}
{kind=link}
{kind=link}