行け!とジェスチャーで飛ばしてみましょう。
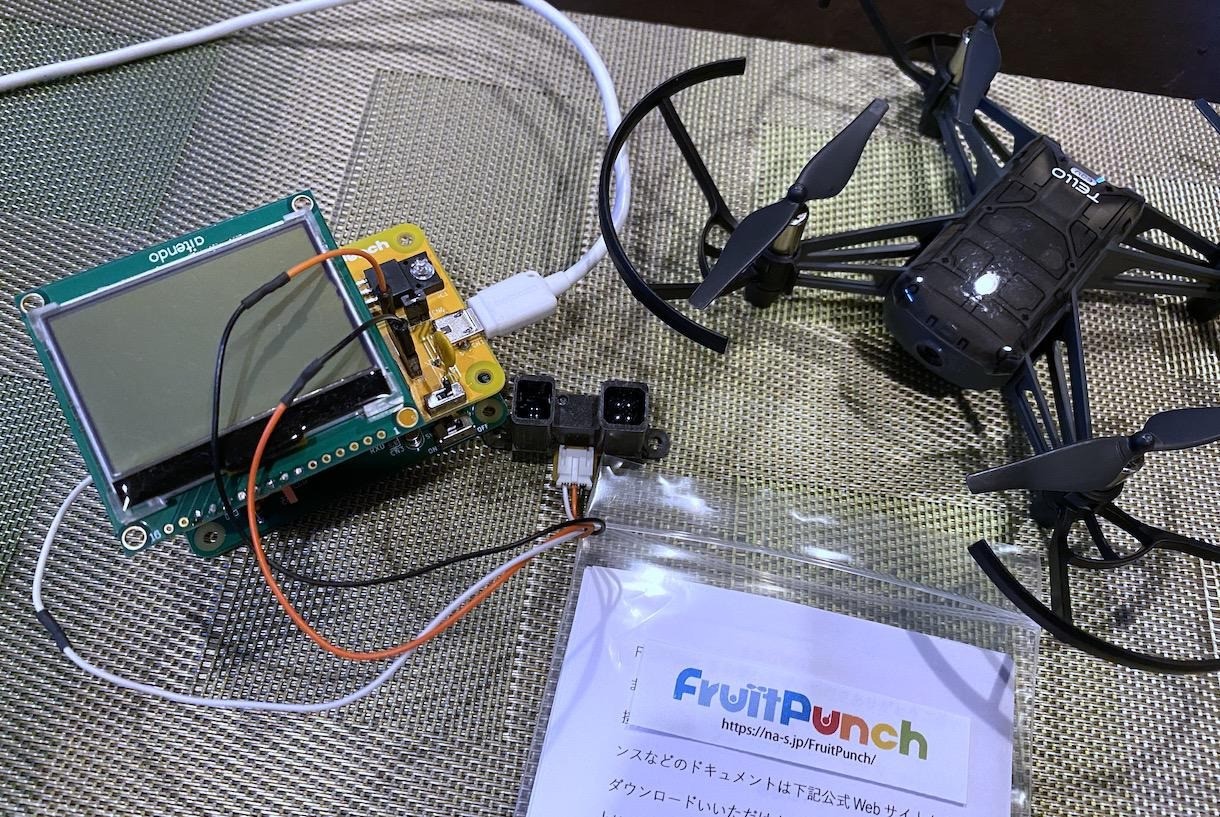
用意するのはドローン「TELLO or TELLO EDU」と「FruitPunch (フルーツポンチ)」、まずはTELLOアプリでアクティベーション。
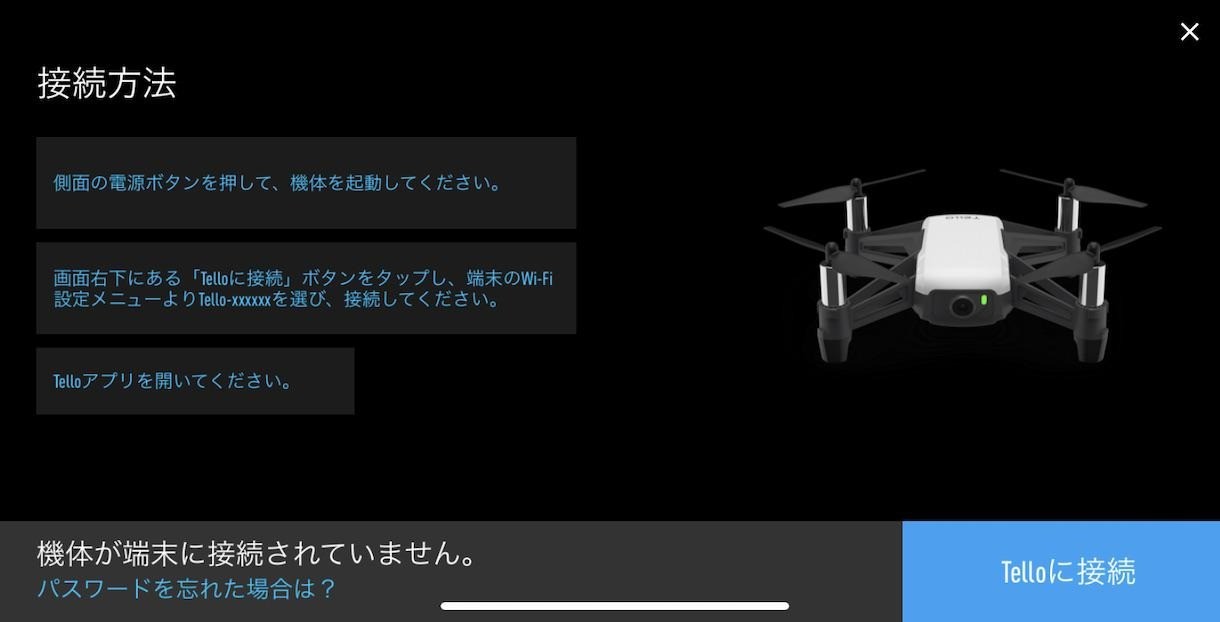
スマホでダウンロードし、TELLOの無線LANアクセスポイントに接続、ドローンの電源を入れ、アプリを立ち上げアクティベーションしましょう。
一度実行すればOKです。

コンパクトに遊ぶため、IchigoLCDを買ってみました!
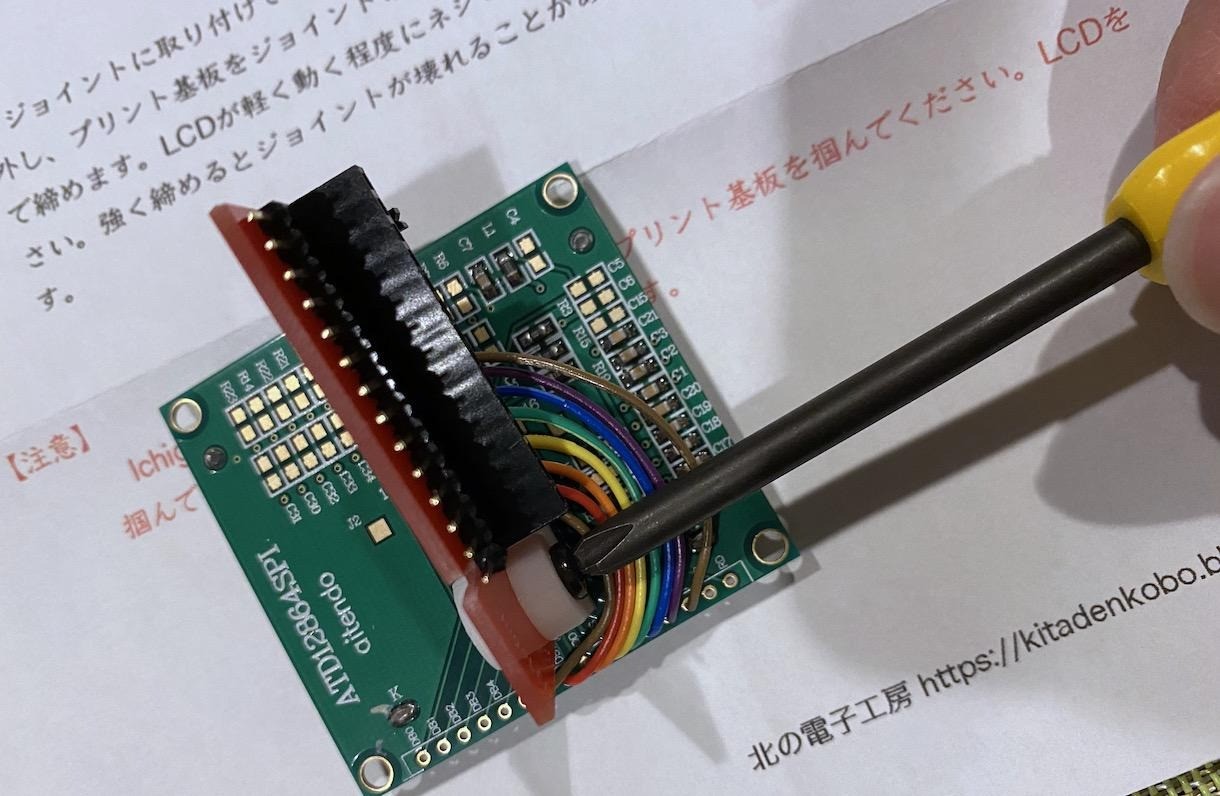
プラスドライバーでネジを締めるだけで使えます!
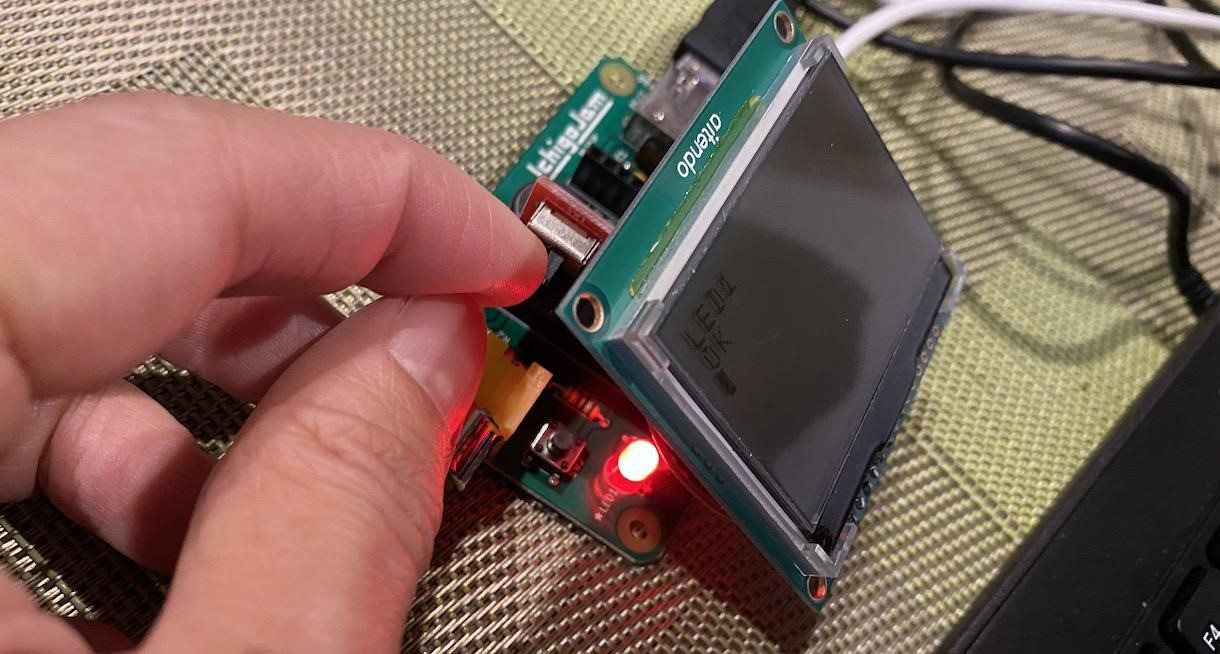
バックライトのON/OFFは物理スイッチがあります。はんだ付けするとLED1と連動させることもできます。
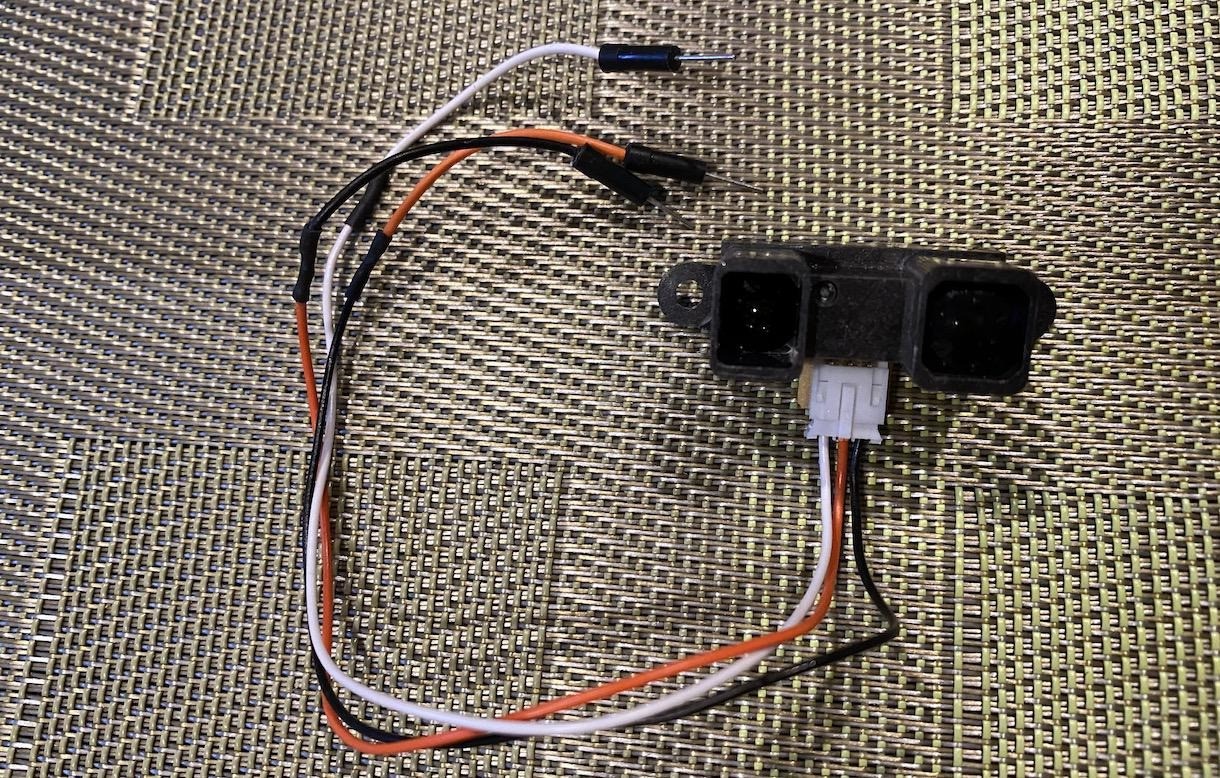
今回はジェスチャーの判定を、昨日も使った測距センサーを使います。電源の色がなぜか逆ですが、ワイヤーで延長する時に逆にしておくといいですよ。
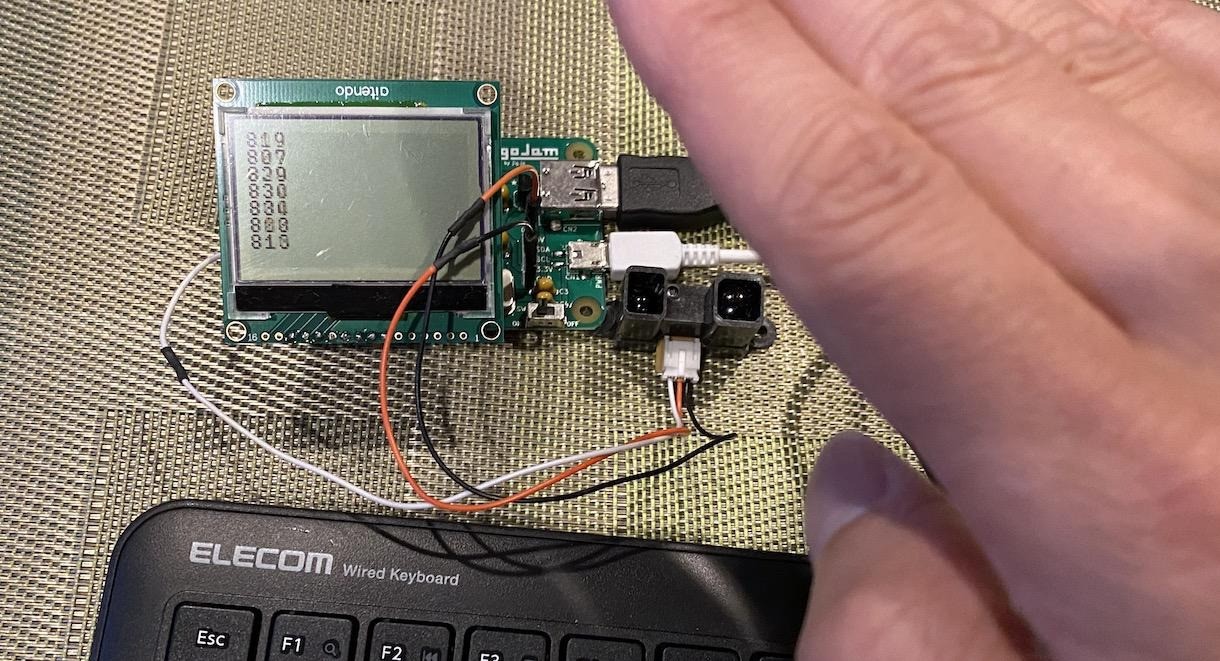
手をかざせば反応します。
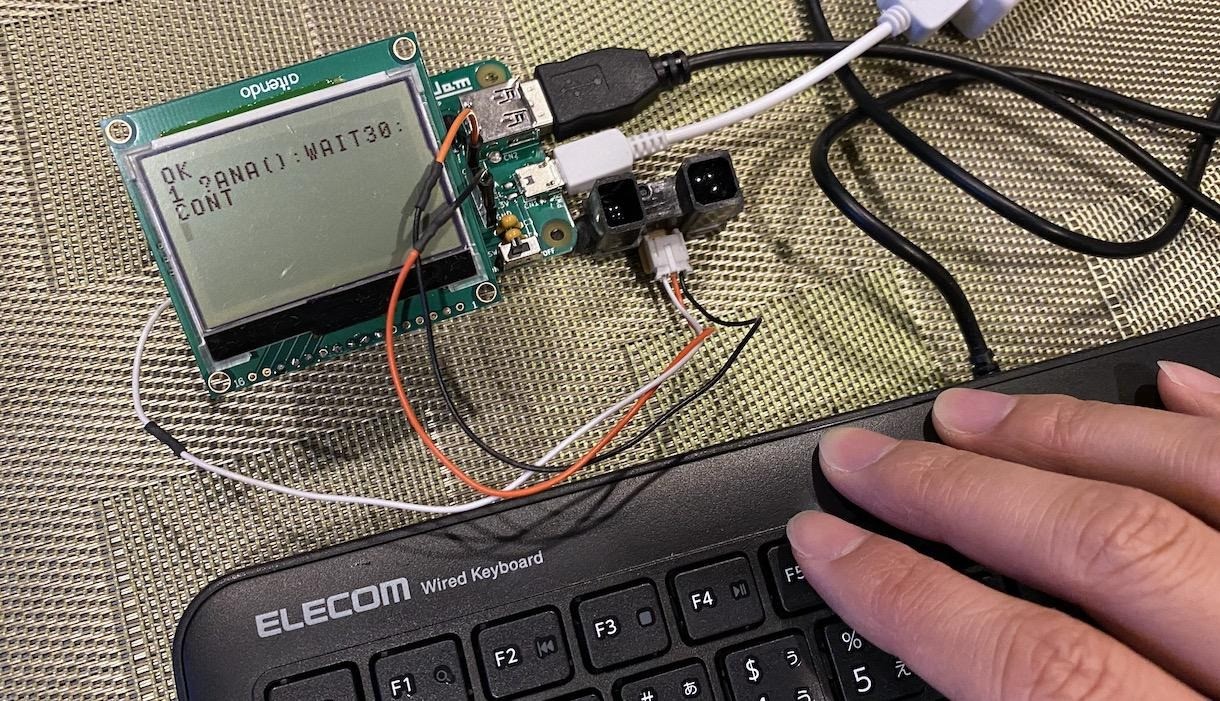
10 ?ANA():WAIT10:CONT
IN2は液晶制御に使ってしまうので、BTNに差し込み、ANA(0)またはANA()で値を取得。
FruitPunchを使って、ドローンとIchigoJamを接続するのはかんたんです。
IchigoJamとFruitPunchを接続し、FruitPunchにmicroUSB電源ケーブルを接続。電源をいれ、文字表示が落ち着くまで待つ。
ドローンTELLOの電源を入れ、次のコマンドでTELLO-で始まるアクセスポイント名を見つける
?"FP APL
カーソルを上にもっていき、?"FP APC TELLO- となるように、編集して、エンターすればOK! connected! になれば準備OKです。
早速飛ばしましょう!
?"FP QRUN
飛びました!
しばらくするとタイムアウトして着陸します。
では、いよいよジェスチャーで飛ばします
10 IF ANA()<400 CONT 20 ?"FP QRUN"
センサーの値が400未満なら待ち、400以上になったら次の行、飛びます!
かんたんですね!
あとは、いろいろとリファレンスを見ながら好きなように実験してみましょう!
「FruitPunch」

いよいよ、来週末11/8、第4回越前がにロボコン、本番!
今年は、福井高専のメディア研究会が、配信、音響、実況は、福井高専学生が担当します!
越前がにロボ、飛んでもよかったっけ!?



{kind=link}
{kind=link}
{kind=link}